18. 设计 Google Maps
18. 设计 Google Maps
我们将设计一个简化版本的 Google Maps。
关于 Google Maps 的一些事实:
- 启动于 2005 年
- 提供各种服务:卫星影像、街道地图、实时交通状况、路线规划
- 到 2021 年,拥有 10 亿日活跃用户,全球覆盖率为 99%,每天更新 2500 万条实时位置信息
第一步:理解问题并确定设计范围
候选人和面试官之间的问答示例:
- 候选人: 我们要处理多少日活跃用户?
- 面试官: 10 亿 DAU
- 候选人: 我们应该专注于哪些功能?
- 面试官: 位置信息更新、导航、预计到达时间 (ETA)、地图渲染
- 候选人: 路况数据有多大?我们可以访问吗?
- 面试官: 我们从多个来源获得了路况数据,原始数据为 TB 级
- 候选人: 我们需要考虑交通状况吗?
- 面试官: 是的,考虑交通状况是必要的,以便提供准确的时间估算
- 候选人: 那不同的出行方式(步行、骑行、驾车)呢?
- 面试官: 我们应该支持这些
- 候选人: 多站点的路线规划呢?
- 面试官: 这部分我们不考虑,面试范围内不讨论
- 候选人: 商业地点和照片呢?
- 面试官: 好问题,但不需要考虑这些
我们将专注于三个关键功能:用户位置更新、导航服务(包括 ETA)、地图渲染。
非功能性需求
- 准确性:用户不应获得错误的导航路线
- 平滑导航:用户应该体验到平滑的地图渲染
- 数据和电池使用:客户端应尽可能少地使用数据和电池,对于移动设备尤为重要。
- 一般的可用性和可扩展性需求
粗略估算
对于存储,我们需要存储:
- 世界地图:估计为 ~70PB,考虑到所有需要存储的切片,并且对非常相似的切片(例如广阔的沙漠)进行压缩
- 元数据:大小可以忽略,因此我们不计算
- 路况信息:以(routing tiles)形式存储
估计的导航请求 QPS:
- 10 亿日活跃用户,每周使用 35 分钟 -> 每天 50 亿分钟。
- 假设 GPS 更新请求是批量处理的,得出 QPS 为 20 万;
- 峰值负载时 QPS 为 100 万。
在进入设计之前,有一些与地图相关的概念我们需要理解。
定位系统
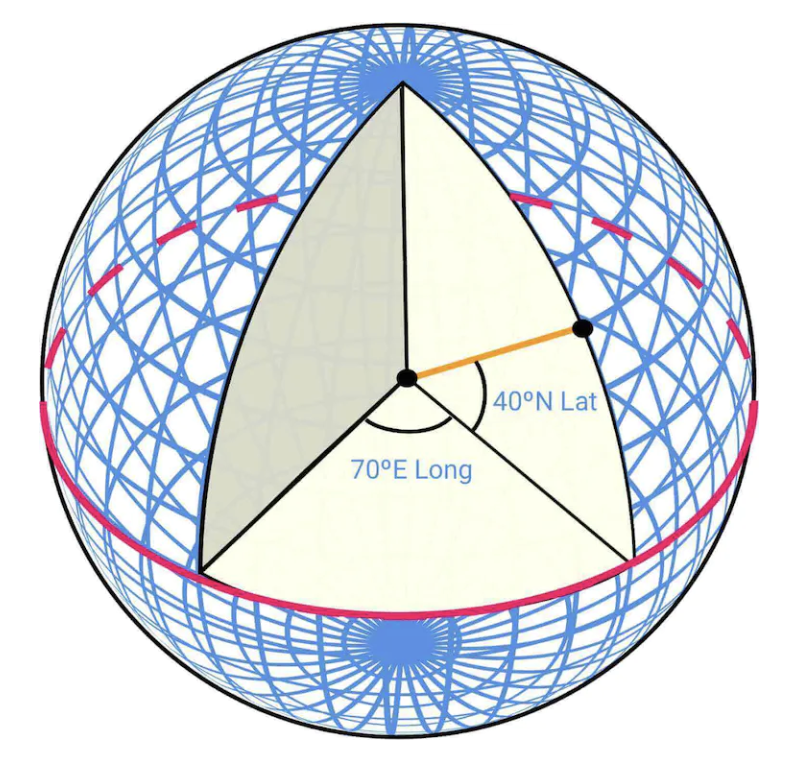
地球是一个球体,围绕其轴线旋转。位置由纬度(指示你离赤道的距离)和经度(指示你离本初子午线的距离)来定义:
从 3D 到 2D
将 3D 坐标转换为 2D 平面的过程称为“地图投影”。
有不同的方法来实现这一点,每种方法都有其优缺点。几乎所有的方法都会扭曲实际的几何形状。
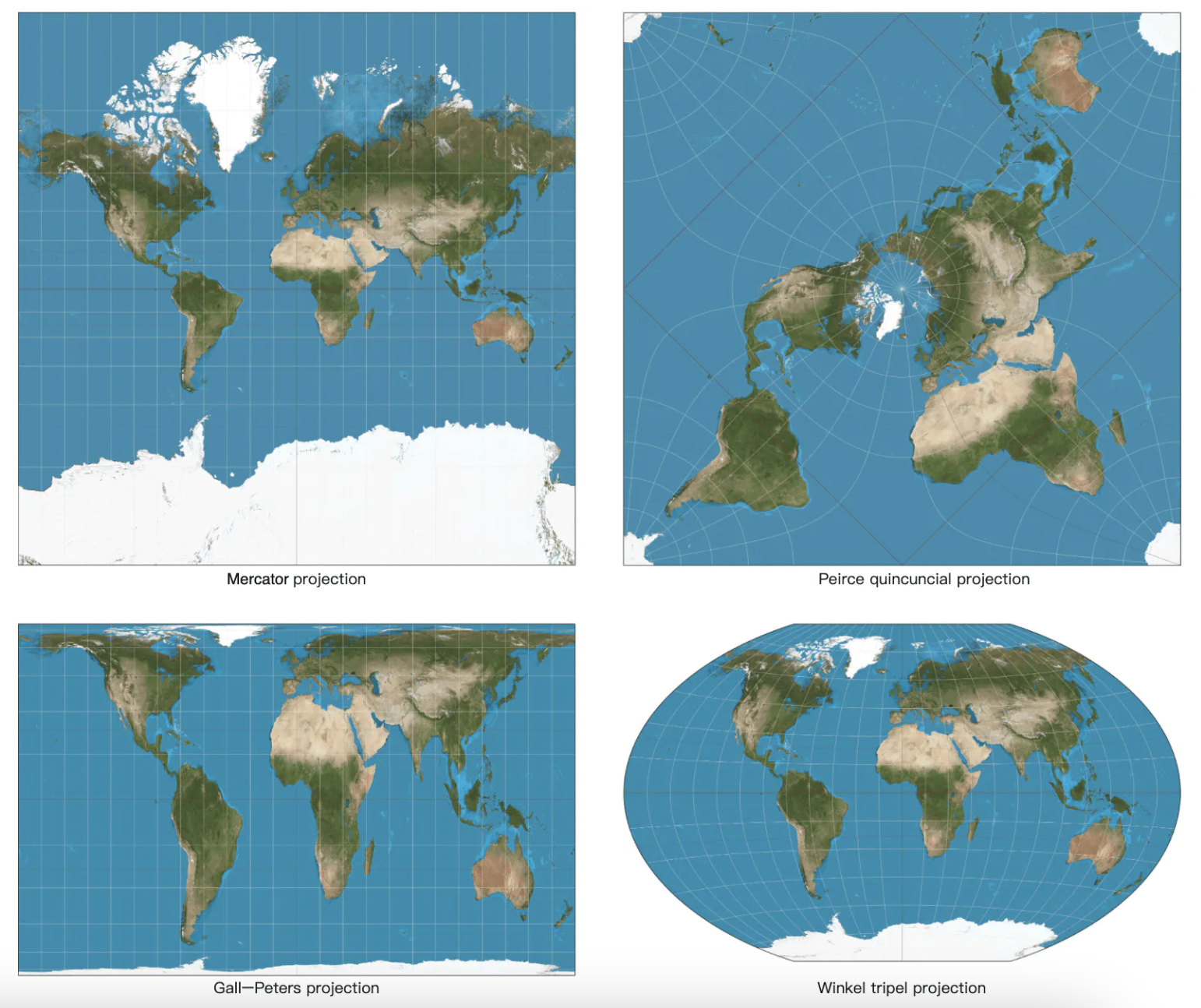
Google Maps 选择了 Mercator 投影的修改版,称为“Web Mercator”。
地理编码(Geocoding)
地理编码是将地址转换为地理坐标的过程。
反向过程称为“反向地理编码”。
实现这一过程的一种方式是使用插值:利用来自不同来源的数据(如 GIS)将街道网络映射到地理坐标空间。
地理哈希(Geohashing)
地理哈希是一种编码系统,它将一个地理区域编码成由字母和数字组成的字符串。
它将地球视为一个平坦的表面,并递归地将其划分为四个象限:

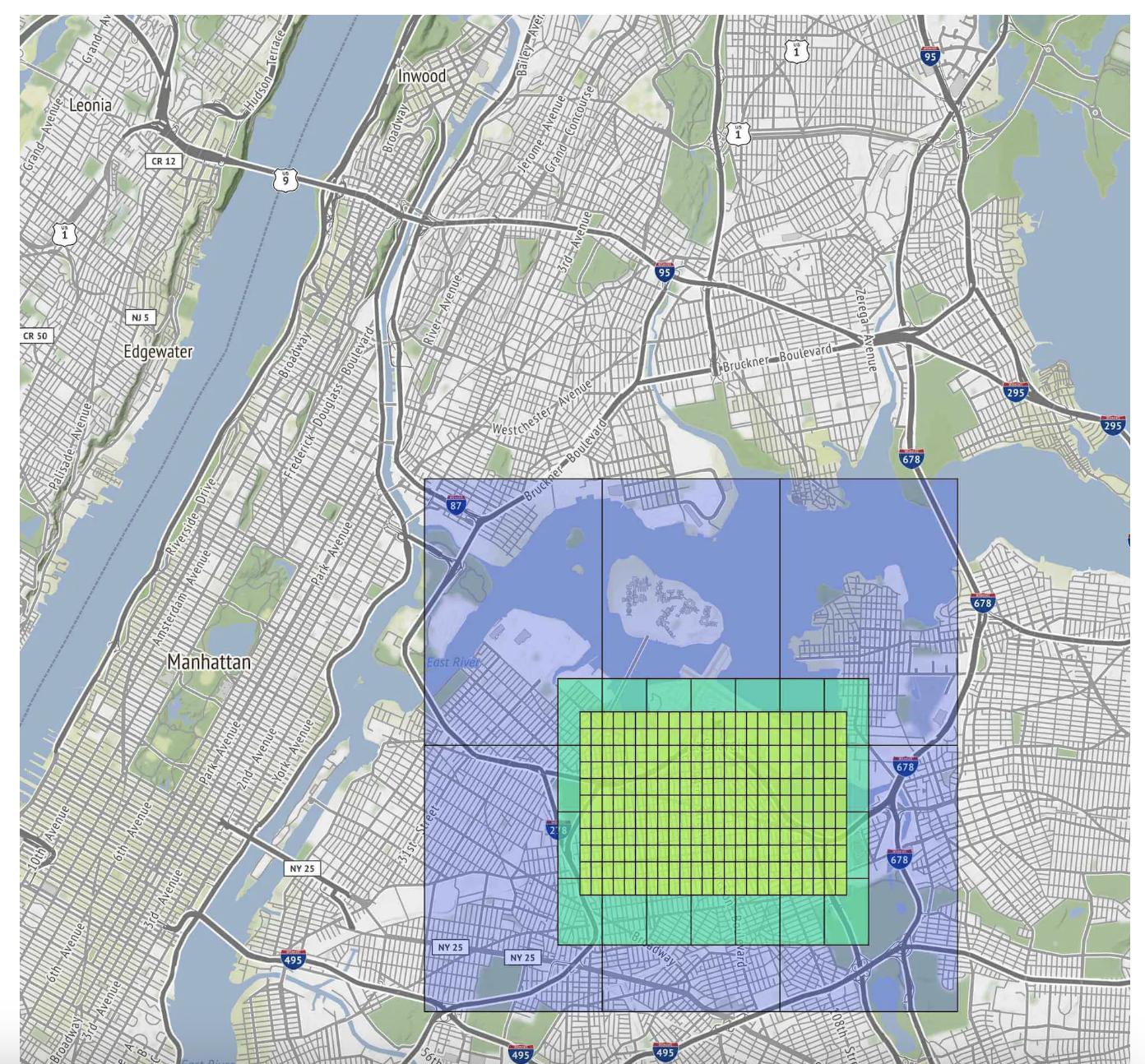
地图渲染
地图渲染通过切片进行,我们没有选择将整个地图作为一张大的自定义图像渲染,而是将世界分解成更小的切片。
客户端只下载相关的切片,并像拼接拼图一样进行渲染。
不同的缩放级别有不同的切片,客户端根据缩放级别选择合适的切片。
例如,缩小到全球视图时,只会下载一张 256x256 的切片,代表整个世界。
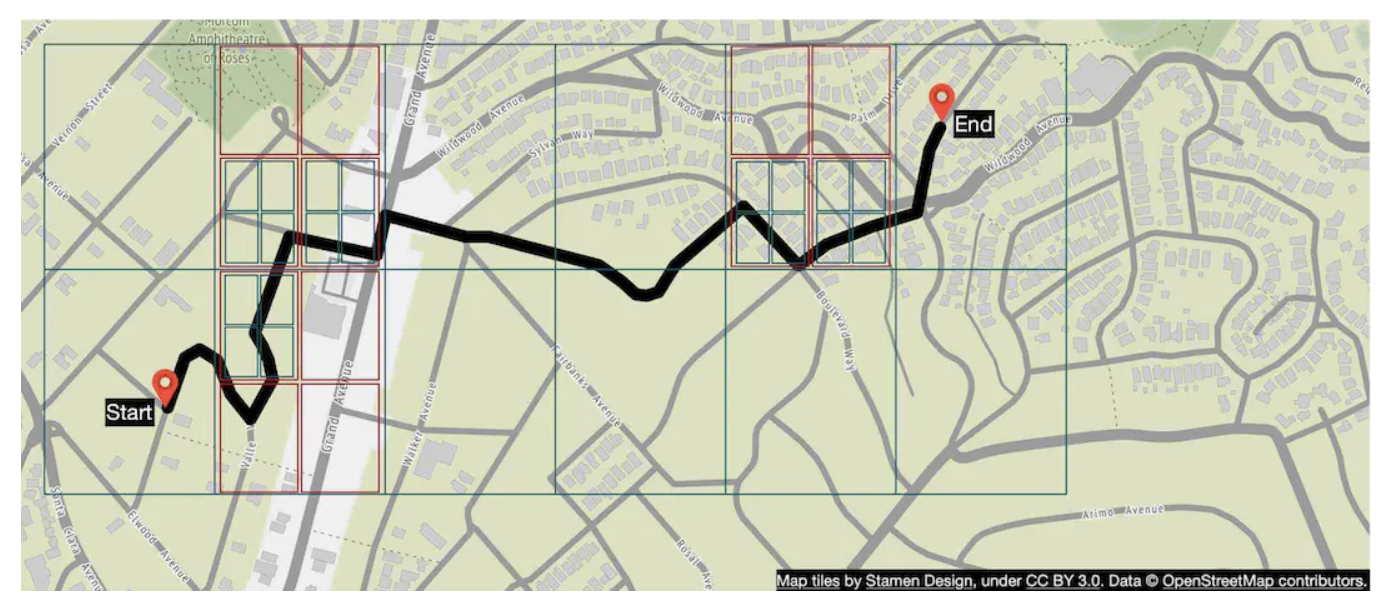
导航算法中的道路数据处理
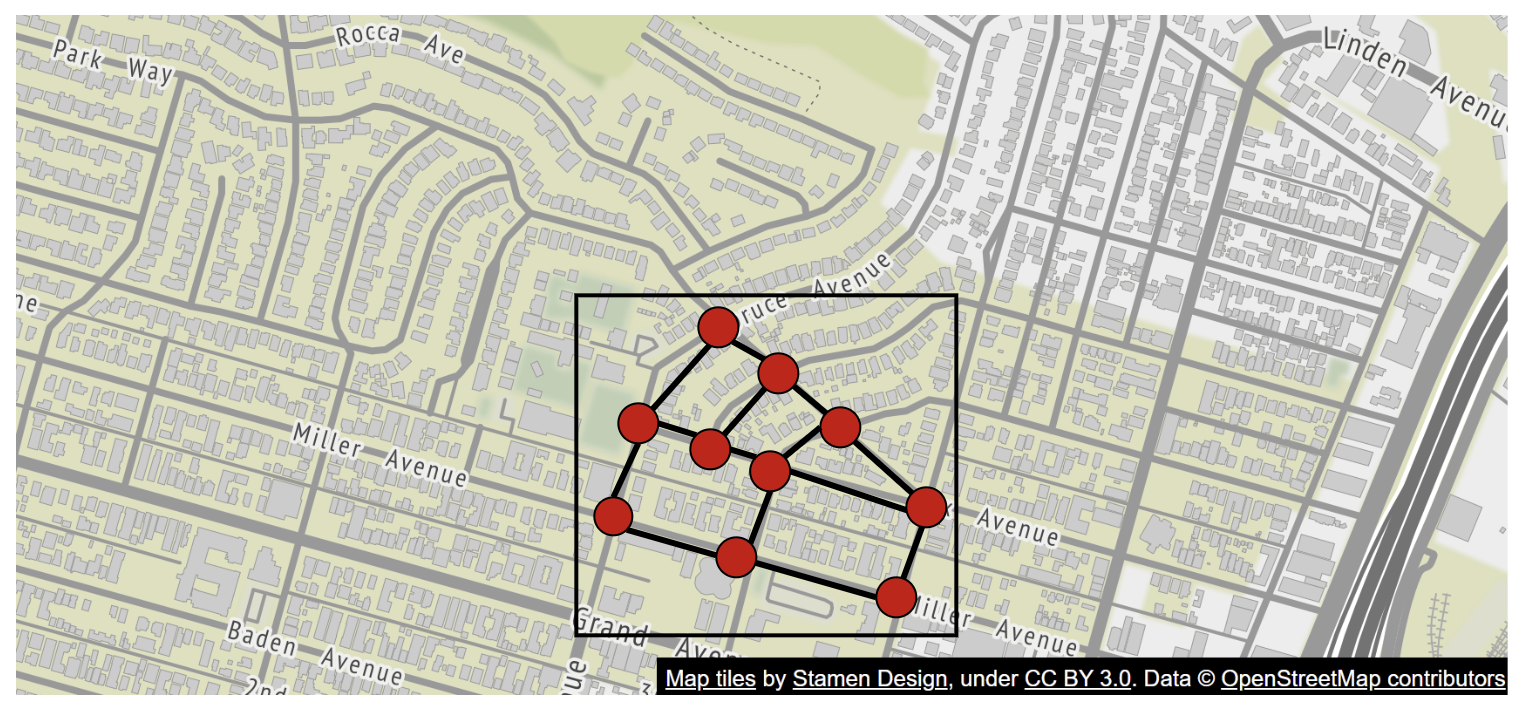
在大多数路径规划算法中,道路被抽象成一个图(graph),交叉点表示为节点,道路表示为边:
大多数导航算法使用修改版的 Dijkstra 或 A* 算法。
路径寻找性能对图的大小非常敏感,为了支持大规模应用,我们不能将整个世界表示为一个图并在其上运行算法。
相反,我们采用类似于切片的技术:将世界划分为越来越小的图。
路由切片(Routing Tiles)持有相邻切片的引用,算法可以在遍历相互连接的切片时,将更大的道路图拼接起来:
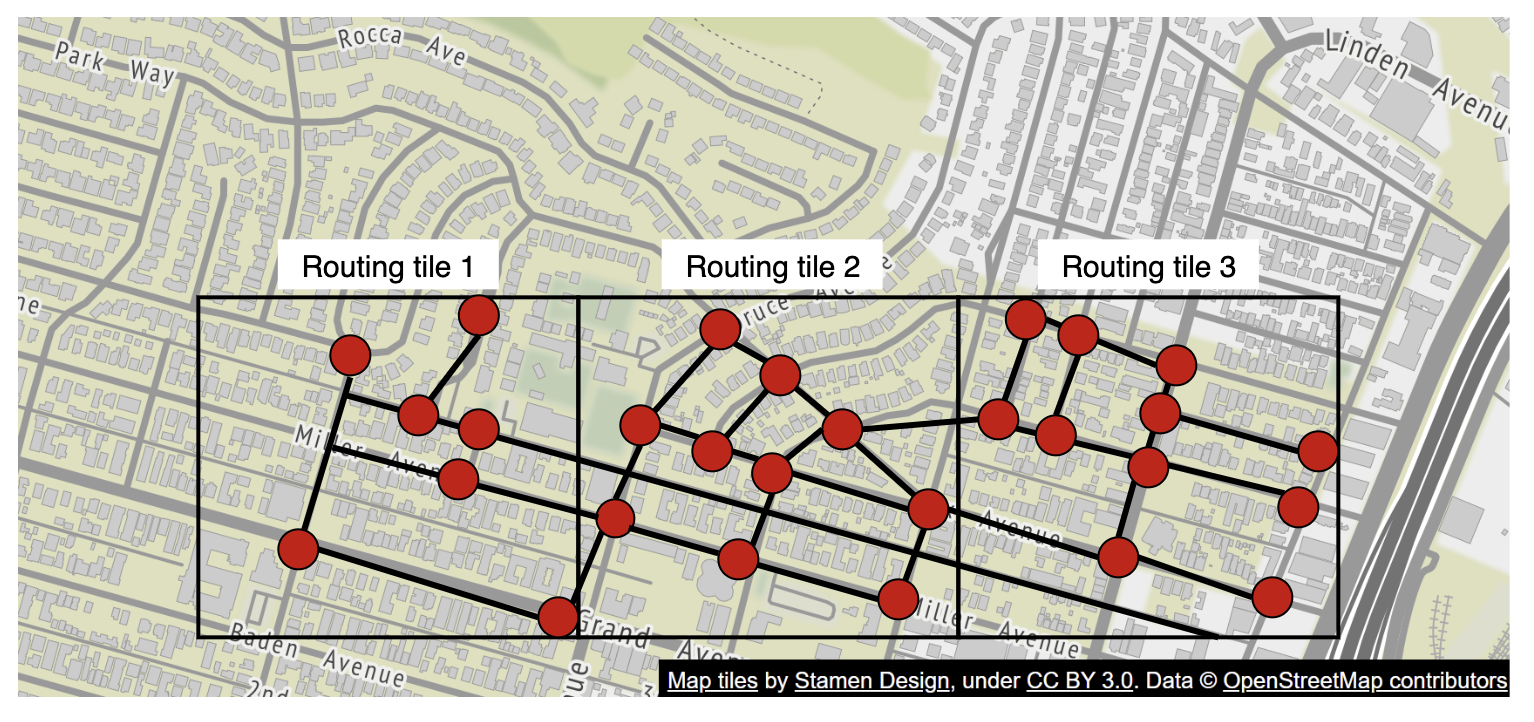
这种技术使我们能够显著减少内存带宽,只加载我们需要的切片来处理给定的起点/终点对。
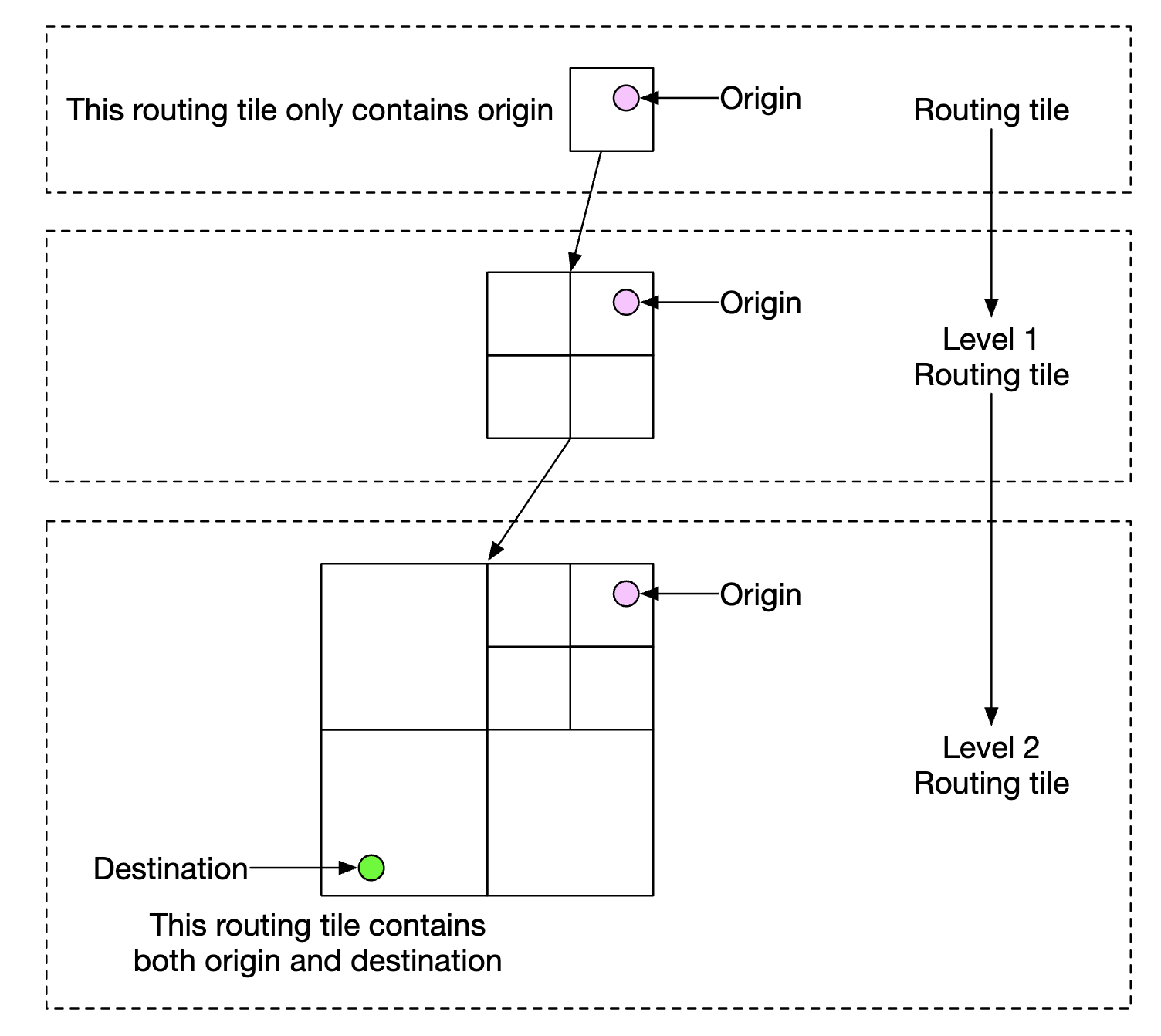
然而,对于较长的路线,拼接小而详细的(routing tiles)仍然会消耗时间和内存。为了解决这个问题,我们使用具有不同详细程度的(routing tiles),并根据目的地选择适当详细程度的切片:
第二步:提出高层设计并获得认可
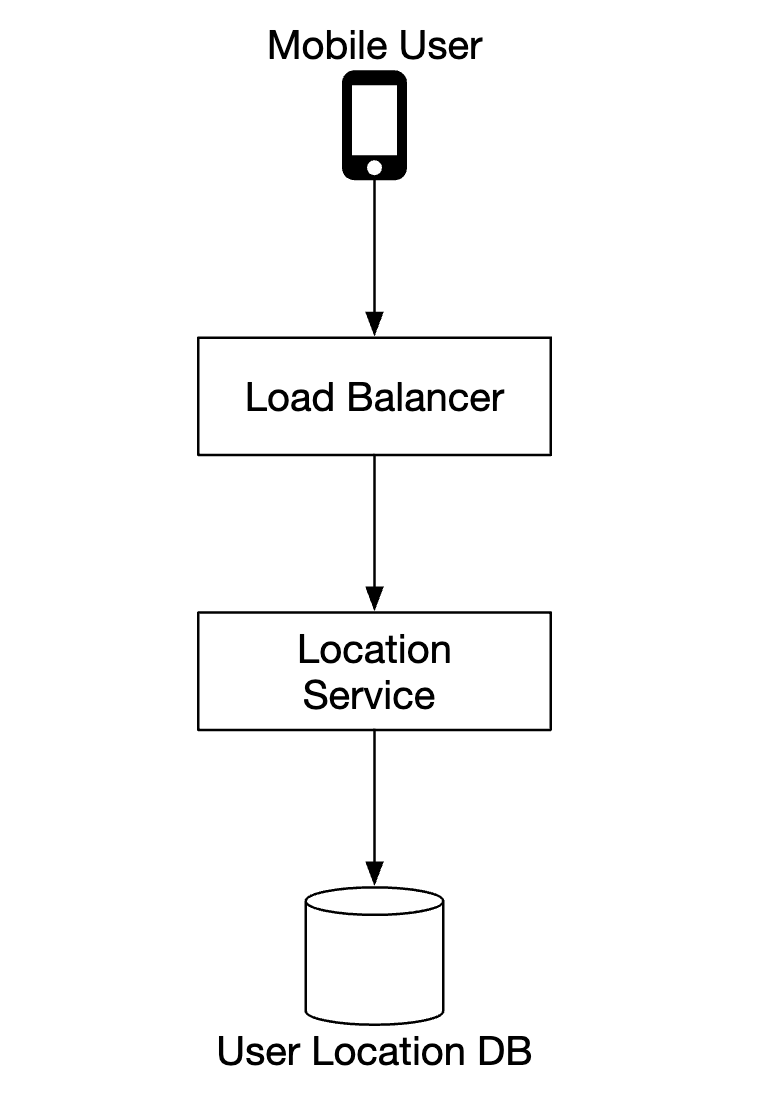
位置服务(Location service)
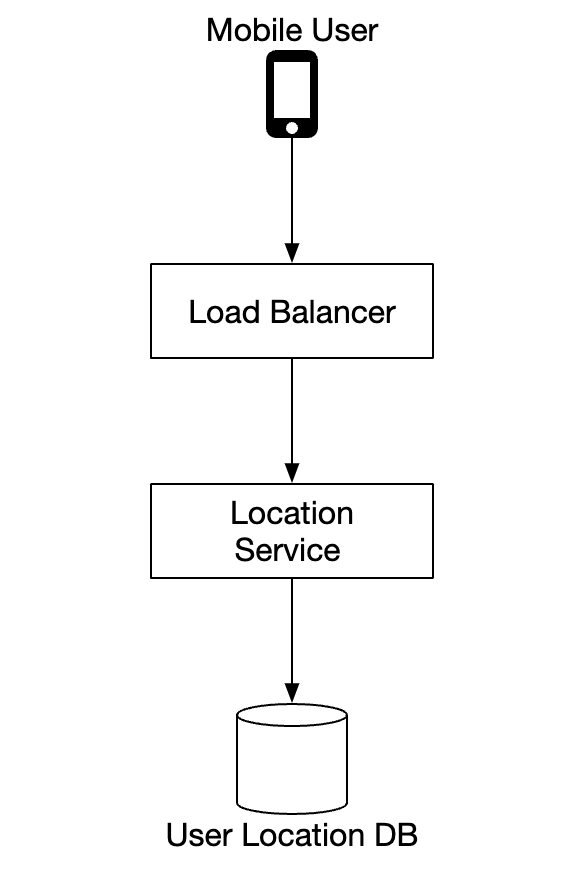
位置服务负责记录用户的位置信息更新:
- 每
t秒发送一次位置更新 - 位置数据流可用于逐步改进服务,例如提供更准确的 ETA、监控交通数据、检测封闭道路、分析用户行为等
为了避免每次都向服务器发送位置更新,我们可以在客户端批量更新并发送批量数据:
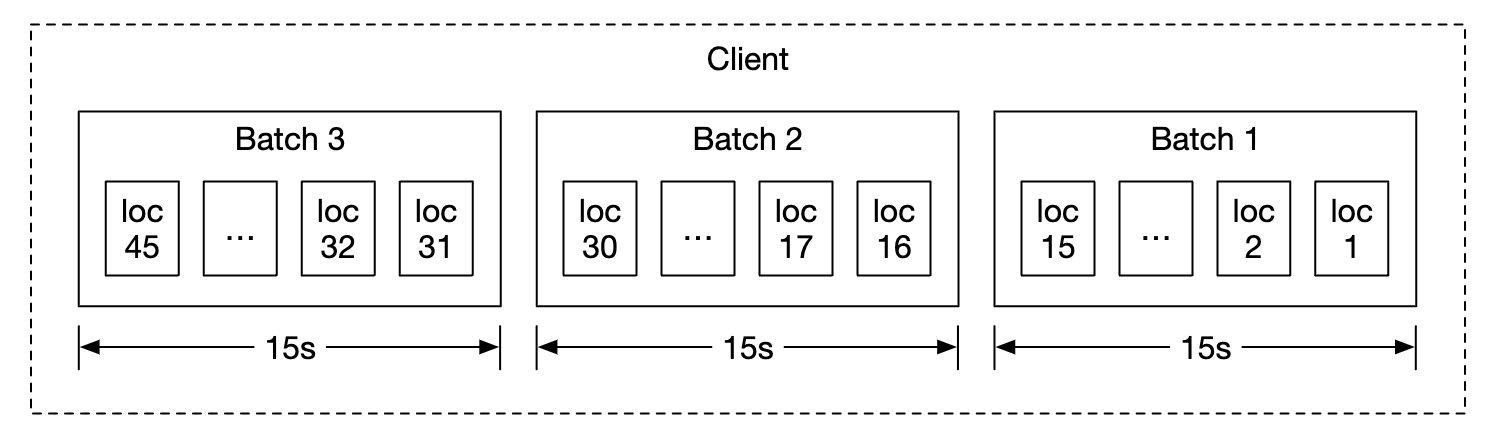
尽管进行了优化,但对于像 Google Maps 这样规模的系统,负载仍然会很大。因此,我们可以使用像 Cassandra 这样的数据库,它对高频写入进行了优化。
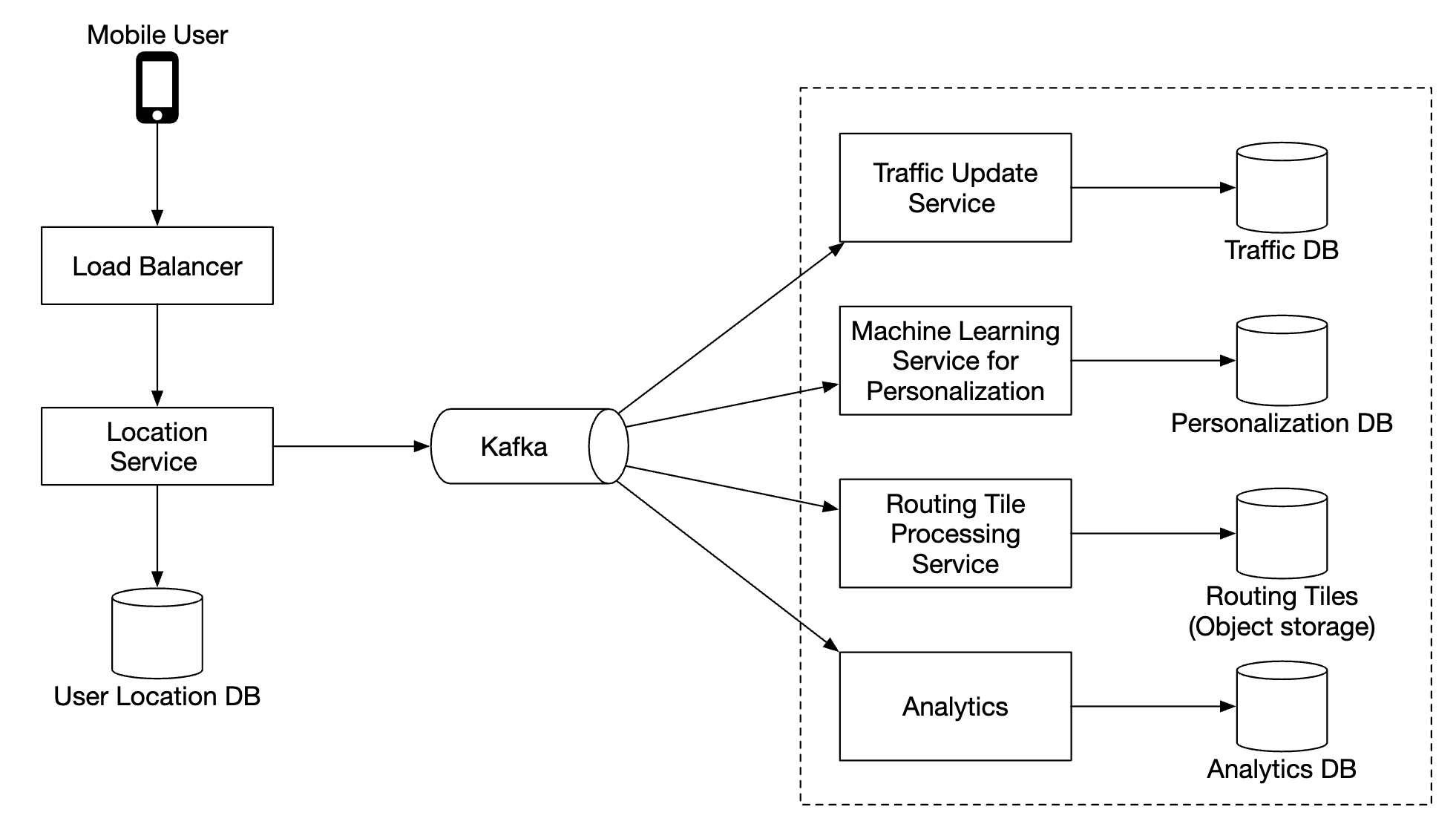
我们还可以利用 Kafka 来高效处理位置更新流,以便进一步分析。
位置更新请求示例:
POST /v1/locations
参数
locs: JSON 编码的 (纬度,经度,时间戳) 元组数组。
导航服务(Navigation service)
导航组件负责在合理的时间内找到 A 和 B 之间的快速路线(少量延迟是可以接受的)。路线不必是最快的,但准确性至关重要。
请求负载示例:
GET /v1/nav?origin=1355+market+street,SF&destination=Disneyland
响应示例:
{
"distance": {"text":"0.2 mi", "value": 259},
"duration": {"text": "1 min", "value": 83},
"end_location": {"lat": 37.4038943, "Ing": -121.9410454},
"html_instructions": "Head <b>northeast</b> on <b>Brandon St</b> toward <b>Lumin Way</b><div style=\"font-size:0.9em\">Restricted usage road</div>",
"polyline": {"points": "_fhcFjbhgVuAwDsCal"},
"start_location": {"lat": 37.4027165, "lng": -121.9435809},
"geocoded_waypoints": [
{
"geocoder_status" : "OK",
"partial_match" : true,
"place_id" : "ChIJwZNMti1fawwRO2aVVVX2yKg",
"types" : [ "locality", "political" ]
},
{
"geocoder_status" : "OK",
"partial_match" : true,
"place_id" : "ChIJ3aPgQGtXawwRLYeiBMUi7bM",
"types" : [ "locality", "political" ]
}
],
"travel_mode": "DRIVING"
}
交通变化和重新规划路径将在深入分析部分讨论。
地图渲染
在客户端存储整个地图数据集是不可行的,因为它的大小是 PB 级的。
这些数据需要根据客户端的位置和缩放级别按需从服务器获取。
何时应获取新切片:用户在缩放地图,或导航时向新切片前进时。
如何将地图切片提供给客户端?
- 可以动态构建,但这会给服务器带来巨大的负载,并且使缓存变得困难
- 地图切片可以根据地理哈希静态提供,客户端可以计算这些哈希。它们可以
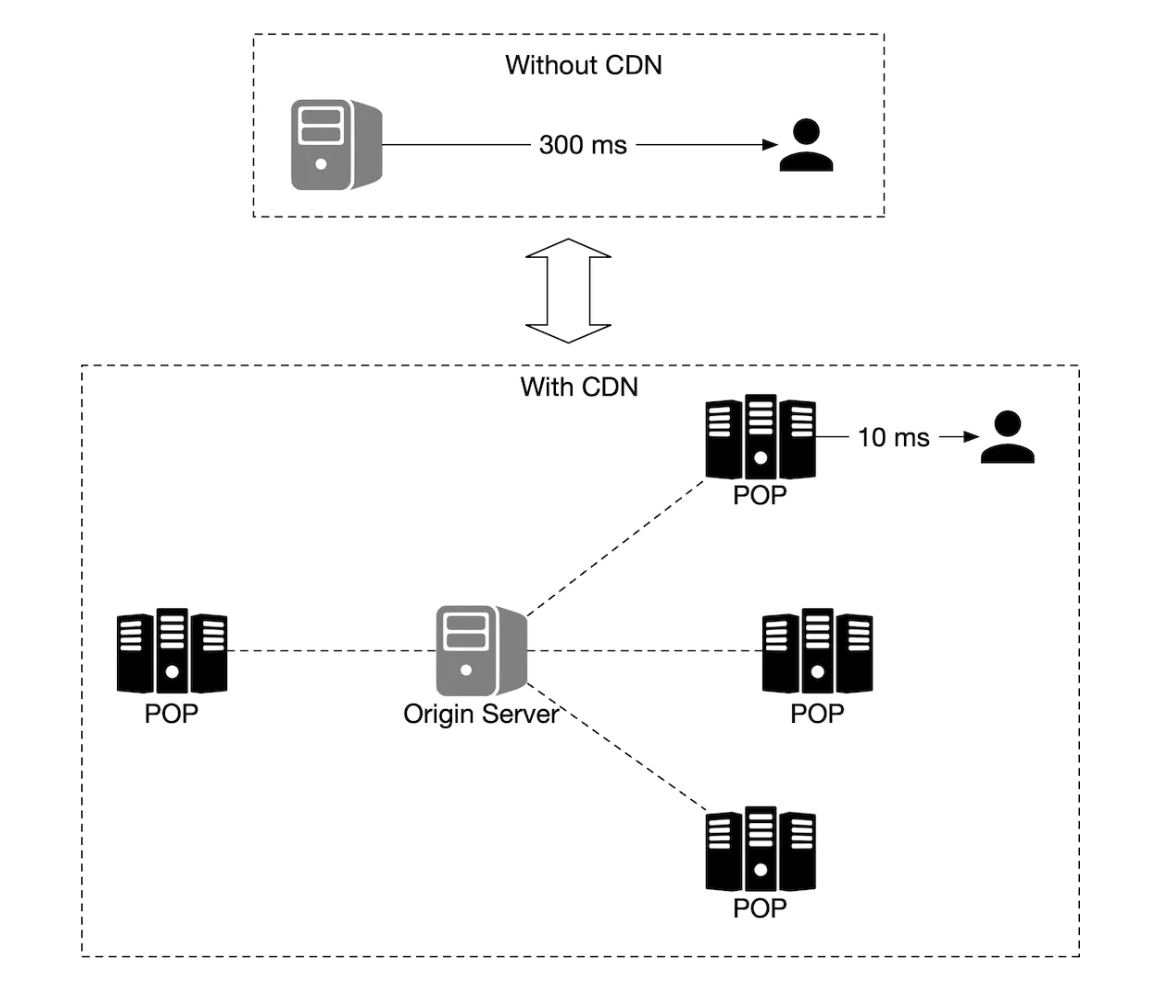
被静态存储,并通过 CDN 提供
CDN 使得用户可以从最靠近用户的服务节点(POP)获取地图切片,以减少延迟:
决定地图切片的选项:
- 地图切片的地理哈希可以在客户端计算。如果是这种方式,我们应该长期支持这种地图切片计算方式,保证应用更新时的后向兼容,因为引导用户更新客户端是困难的。
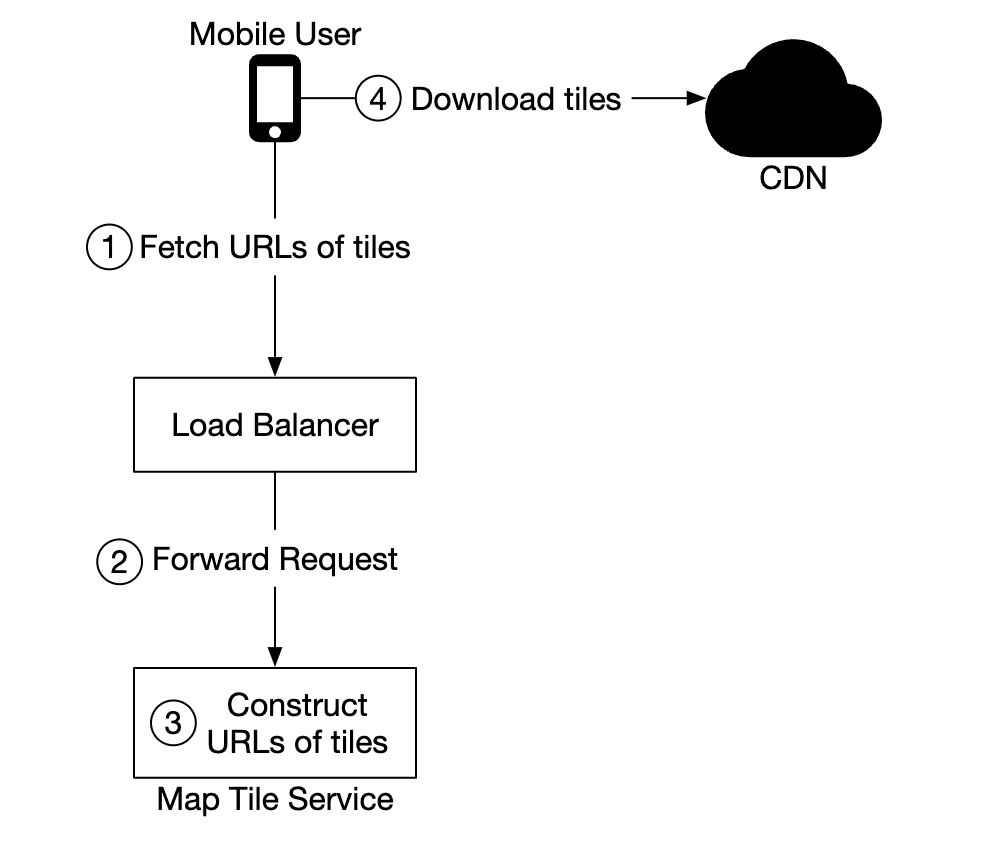
- 另外,我们可以提供一个简单的 API,计算地图切片的 URL,并为客户端提供服务,代价是额外的 API 调用
第三步:设计深度分析
数据模型
首先,我们来讨论如何存储系统所处理的不同类型的数据。
路由切片
初始的道路数据集来自不同的来源,随着位置更新数据的不断增加,数据会逐渐得到改进。
道路数据是非结构化的。我们有一个周期性的离线处理任务,将这些原始数据转换为我们应用程序需要的基于图的路由切片。
我们不需要使用数据库来存储这些切片,因为我们不需要任何数据库的功能。我们可以将它们存储在 S3 对象存储中,并进行积极的缓存。
我们还可以利用库将邻接列表有效地压缩成二进制文件。
用户位置数据
用户位置数据对更新交通状况和进行各种其他分析非常有用。
我们可以使用 Cassandra 来存储这类数据,因为它的特点是写入频繁。
示例行:
地理编码数据库
这个数据库存储经纬度对和地点之间的键值对。
我们可以使用 Redis,因为它具有快速的读取访问速度,而我们的读取频繁且写入不多。
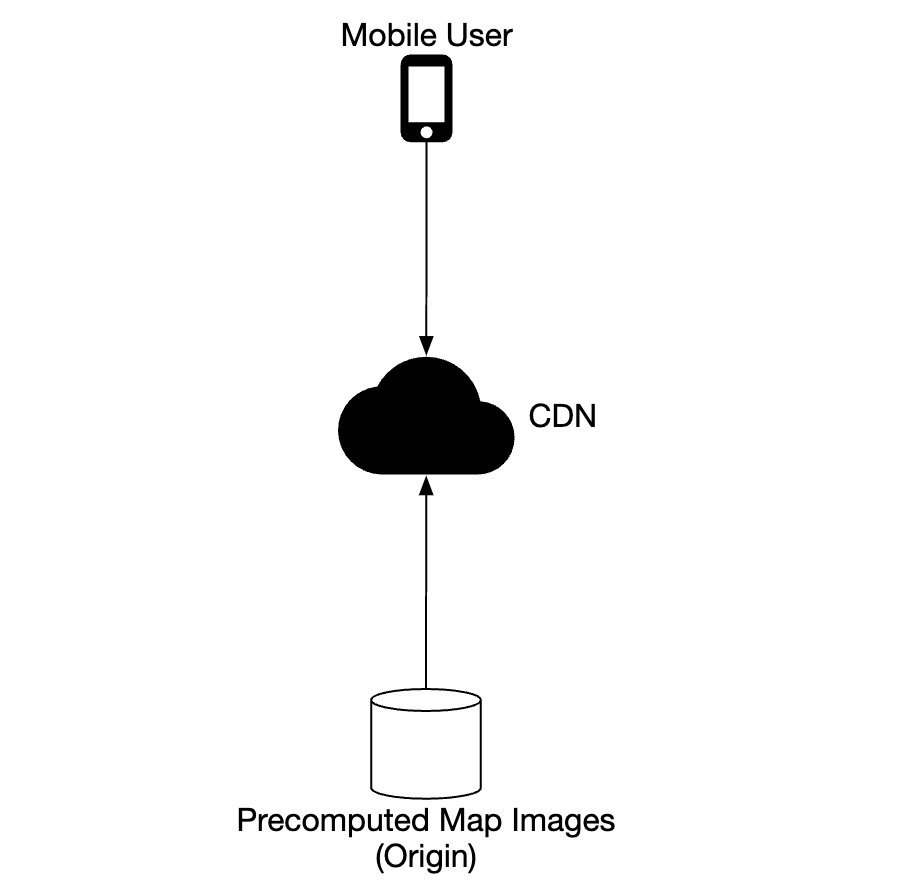
预计算的世界地图图像
如前所述,我们将预计算地图切片图像并将其存储在 CDN 中。
位置服务
接着,让我们专注于数据库设计,并详细说明如何存储用户位置数据。
我们可以使用 NoSQL 数据库来支持我们在位置更新上的重写负载。我们优先考虑可用性而非一致性,因为用户位置数据经常发生变化,容易过时。
我们将选择 Cassandra 作为我们的数据库选择,因为它很好地满足了我们的所有需求。
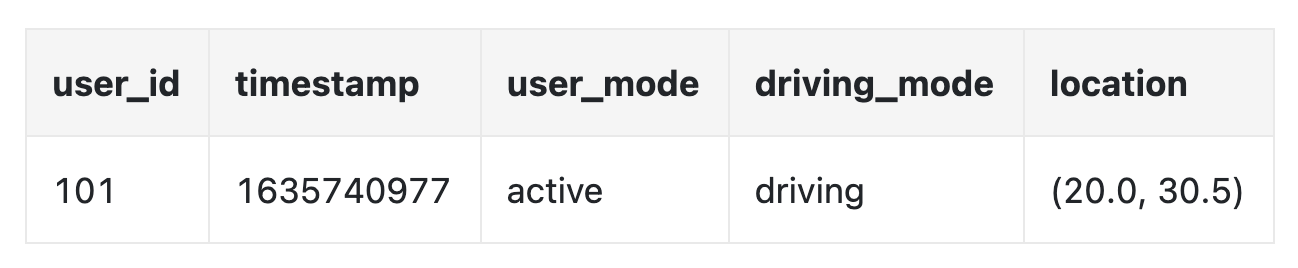
我们将存储的示例行:

user_id是分区键,用于快速访问特定用户的所有位置更新timestamp是聚类键,用于按位置更新接收的时间对数据进行排序
我们还利用 Kafka 将位置更新流式传输到其他需要位置更新的服务:
渲染地图
地图切片存储在不同的缩放级别下,在最低缩放级别,整个世界由一个 256x256 的切片表示。
随着缩放级别的增加,地图切片的数量增加四倍:
我们可以使用的一种优化方法是,不通过网络发送整个图像信息,而是将切片表示为向量(路径和多边形),并让客户端动态渲染切片。
这将大大节省带宽。
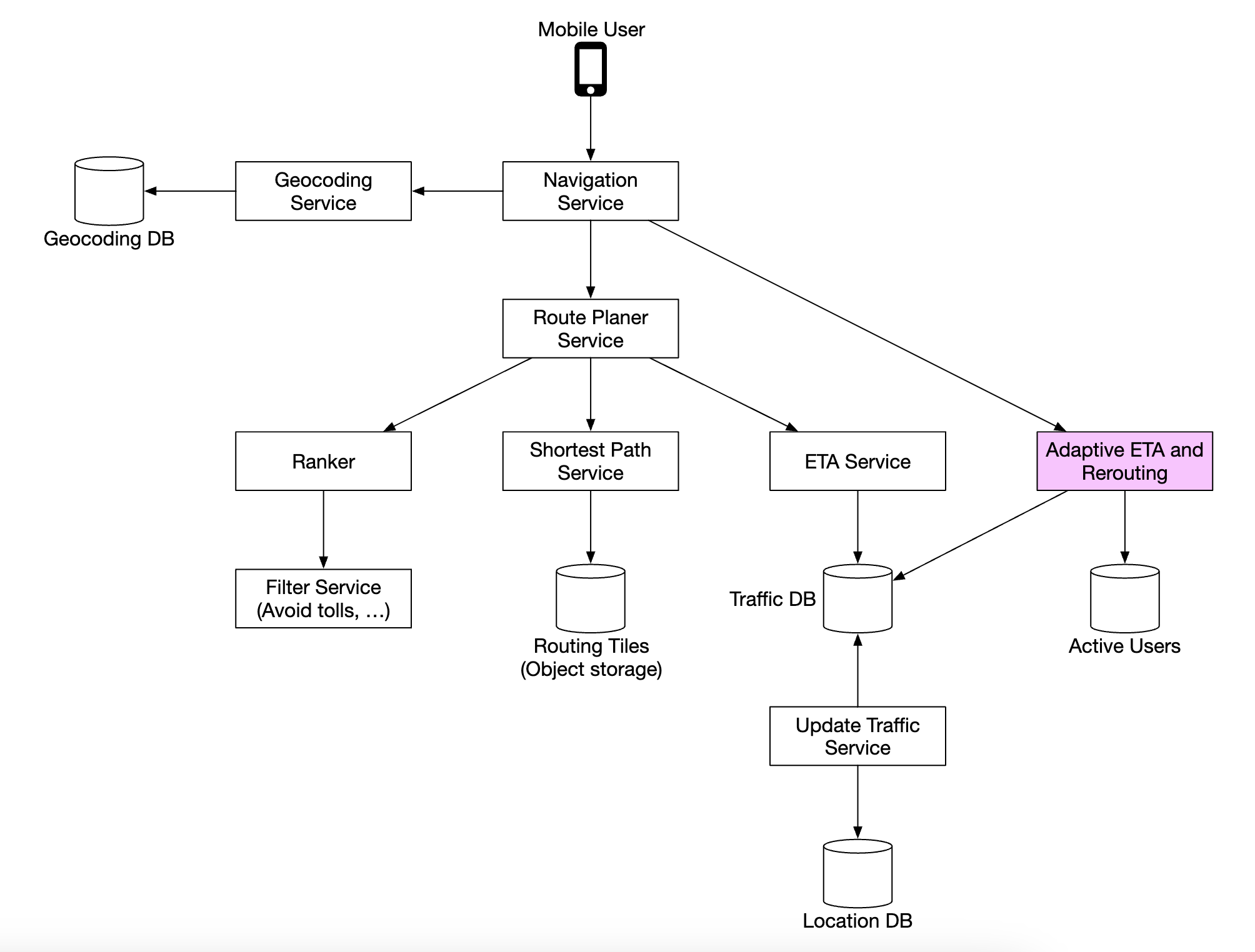
导航服务
导航服务负责找到最快的路线:
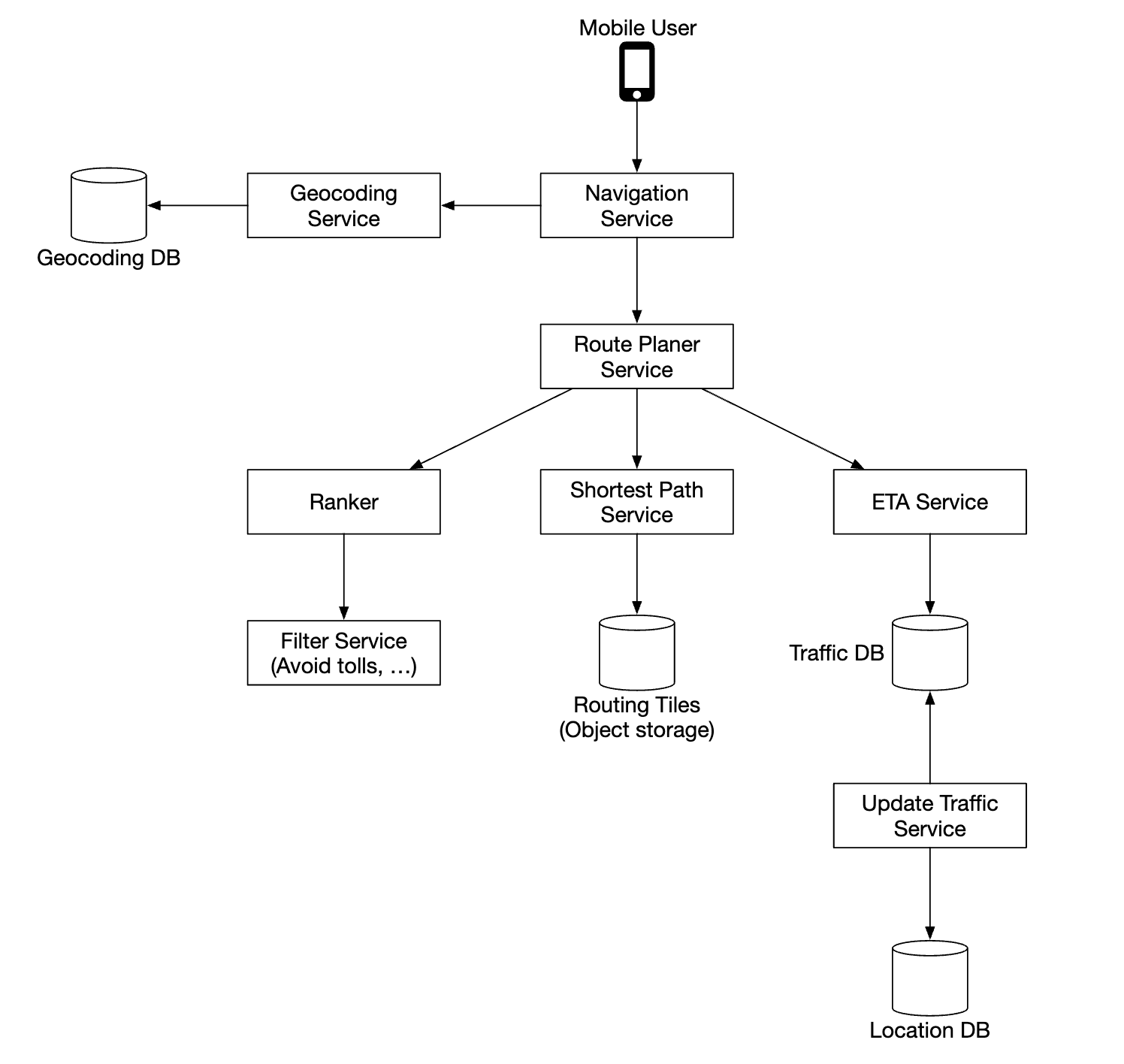
让我们逐个查看这个子系统中的每个组件。
首先,我们有地理编码服务,它将地址解析为经纬度对的位置。
示例请求:
https://maps.googleapis.com/maps/api/geocode/json?address=1600+Amphitheatre+Parkway,+Mountain+View,+CA
示例响应:
{
"results" : [
{
"formatted_address" : "1600 Amphitheatre Parkway, Mountain View, CA 94043, USA",
"geometry" : {
"location" : {
"lat" : 37.4224764,
"lng" : -122.0842499
},
"location_type" : "ROOFTOP",
"viewport" : {
"northeast" : {
"lat" : 37.4238253802915,
"lng" : -122.0829009197085
},
"southwest" : {
"lat" : 37.4211274197085,
"lng" : -122.0855988802915
}
}
},
"place_id" : "ChIJ2eUgeAK6j4ARbn5u_wAGqWA",
"plus_code": {
"compound_code": "CWC8+W5 Mountain View, California, United States",
"global_code": "849VCWC8+W5"
},
"types" : [ "street_address" ]
}
],
"status" : "OK"
}
路线规划服务根据当前的交通状况计算建议路线,优化旅行时间。
最短路径服务运行一种变种的 A* 算法,在对象存储中的路由切片上计算最优路径:
- 它接收源/目的地对,将其转换为经纬度对,并从这些对中推导出地理哈希,以确定路由切片
- 算法从初始路由切片开始,开始遍历直到找到一个到目的地切片的合理路径
ETA 服务被路线规划服务调用,以基于机器学习算法根据交通数据预测 ETA(预计到达时间)。
排序服务负责根据用户传递的过滤器对不同的路径进行排序,比如避免收费公路或高速公路等标志。
更新服务异步更新一些重要的数据库,以保持它们的最新状态。
改进 - 自适应 ETA 和重新规划路线
我们可以进行的一项改进是,根据新获取的交通数据自适应更新正在进行的路线。
一种实现方式是,通过存储用户正在导航的路线中的所有切片,将这些用户存储在数据库中。
数据可能如下所示:
user_1: r_1, r_2, r_3, …, r_k
user_2: r_4, r_6, r_9, …, r_n
user_3: r_2, r_8, r_9, …, r_m
...
user_n: r_2, r_10, r21, ..., r_l
如果某个切片发生交通事故,我们可以识别出所有经过该切片的用户,并重新规划他们的路线。
为了减少我们在数据库中存储的切片数量,我们可以改为存储起始路由切片和几个不同分辨率级别的路由切片,直到目的地切片也被包含在内:
user_1, r_1, super(r_1), super(super(r_1)), ...
通过这种方式,我们只需要检查用户的最终切片是否包含交通事故的切片,从而判断用户是否受到影响。
我们还可以跟踪正在导航的用户的所有可能路线,并在有更快的重新规划路径时通知他们。
传输协议
我们有几种选择,可以让我们主动从服务器向客户端推送数据:
- 移动推送通知不适用,因为负载有限,且不适用于 Web 应用
- WebSocket 通常比长轮询更好,因为它对服务器的计算负担较小
- 我们还可以使用服务器推送事件(SSE),但更倾向于使用 WebSocket,因为它支持双向通信,这在例如最后一公里配送功能中非常有用
第四步:总结
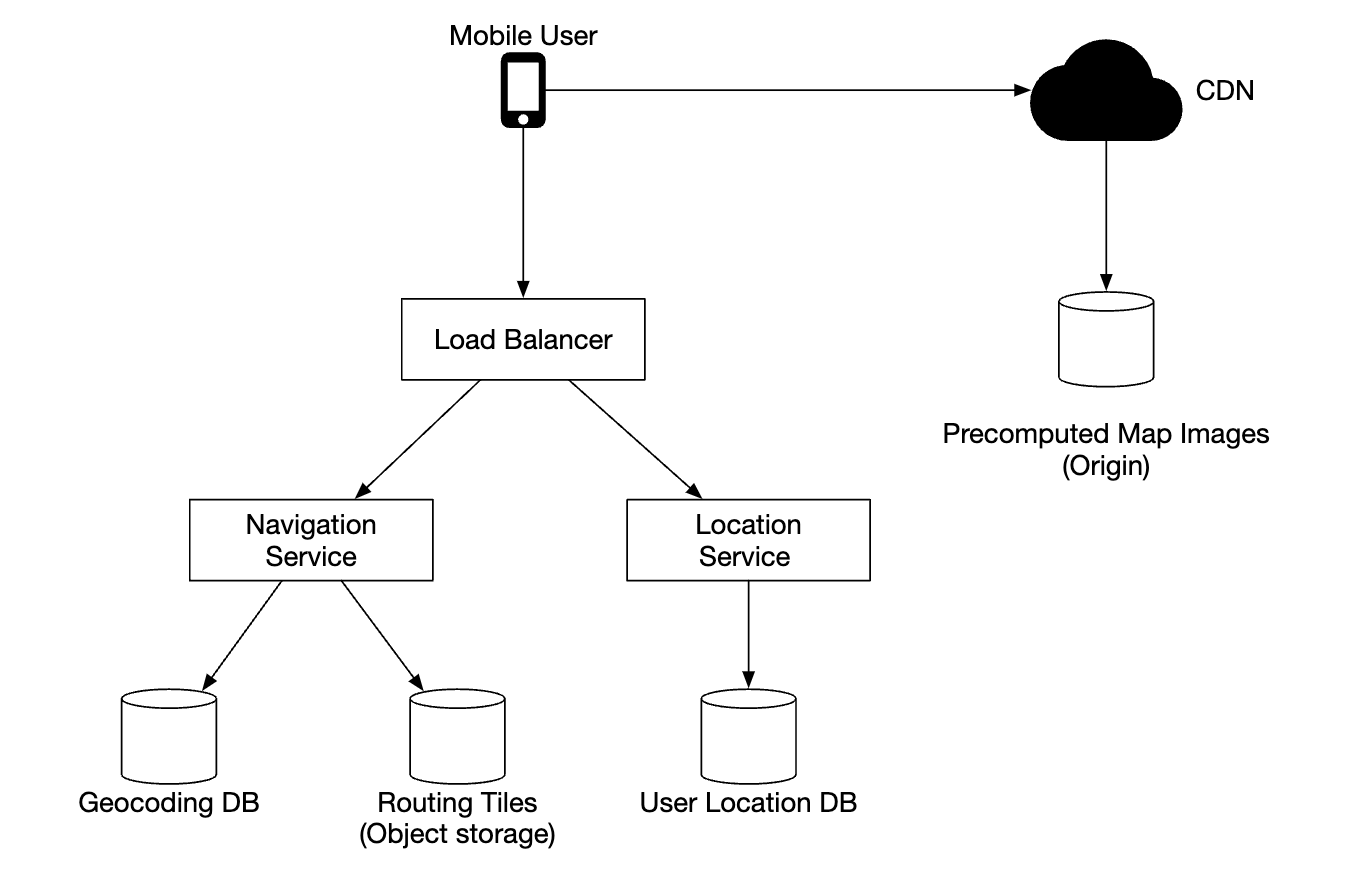
这是我们的最终设计:
我们可以提供的一个附加功能是多站点导航,这可以出售给像 Uber 或 Lyft 这样的企业客户,以确定访问一组位置的最优路径。