6. 设计键值存储
6. 设计键值存储
键值存储(Key-Value Store)是一种非关系型数据库,具有以下特点:
- 每个唯一标识符作为一个键(Key)存储,并与一个值(Value)关联。
- 键必须唯一,可以是明文字符串或哈希值。
- 从性能角度看,较短的键通常表现更优。
示例键:
- 明文键:
"last_logged_in_at" - 哈希键:
253DDEC4
我们将设计一个支持以下操作的键值存储系统:
put(key, value):插入与key相关联的value。get(key):获取与key相关联的value。
第一步:理解问题并确定设计范围
在设计系统时,需权衡读写性能与内存使用之间的关系。此外,数据一致性与系统可用性之间也存在取舍。
设计目标包括:
- 小型键值对:键值对的大小约为 10KB。
- 大规模数据存储:系统应能存储海量数据。
- 高可用性:系统即使在发生故障时也能快速响应。
- 高可扩展性:系统需支持扩展以处理大数据集。
- 自动扩展:根据流量自动添加或删除服务器。
- 可调一致性。
- 低延迟。
第二步:提出高层设计并获得认可---
单机键值存储
单机键值存储实现简单。
只需维护一个内存中的哈希表,用来存储键值对。然而,内存可能成为瓶颈,因为无法容纳全部数据。
扩展方式:
- 数据压缩
- 仅将频繁使用的数据存储在内存中,其余存储在磁盘上
即便如此,单台服务器的容量很快会达到上限。
分布式键值存储
分布式键值存储通过分布式哈希表(Distributed Hash Table)将键分配到多个节点上。设计时需要考虑 CAP 定理。
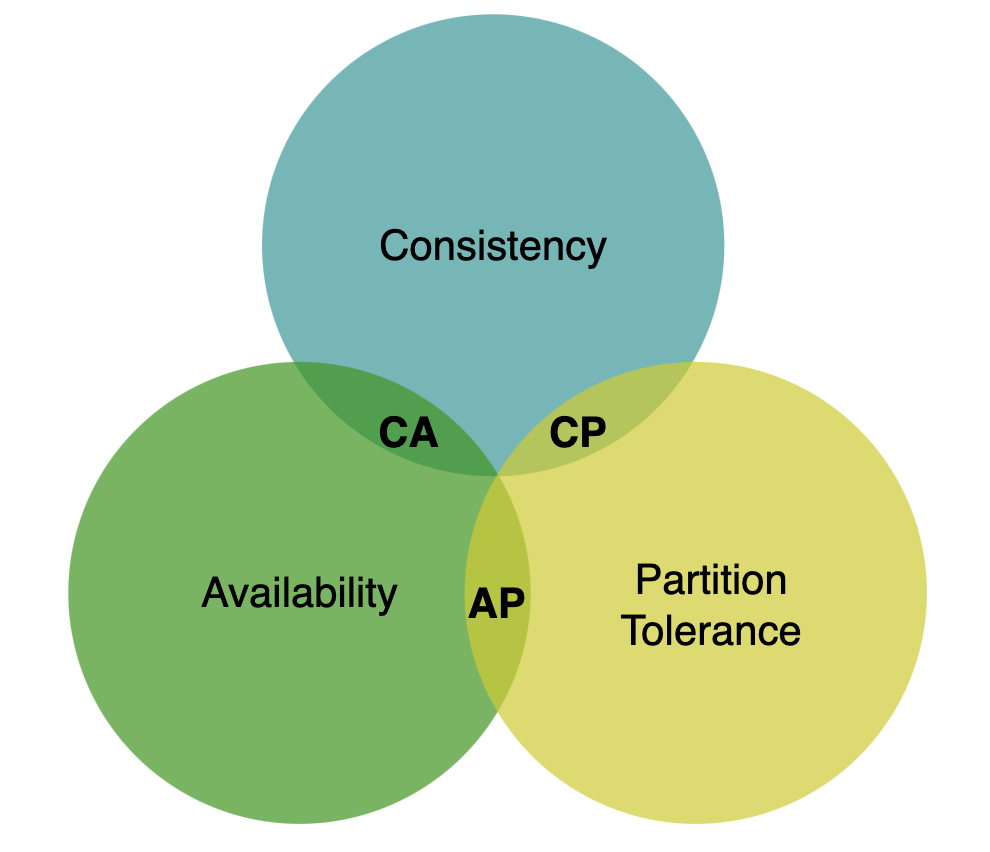
CAP 定理
CAP 定理指出,分布式系统无法同时满足以下三种属性:
- 一致性(Consistency):所有客户端在任何时间点都能看到相同的数据。
- 可用性(Availability):所有客户端都能收到响应,即使某些节点发生故障。
- 分区容错性(Partition Tolerance):系统在部分节点间无法通信的情况下仍可正常工作。
在现实世界中,由于网络故障不可避免,支持一致性和可用性的分布式系统无法真正存在。
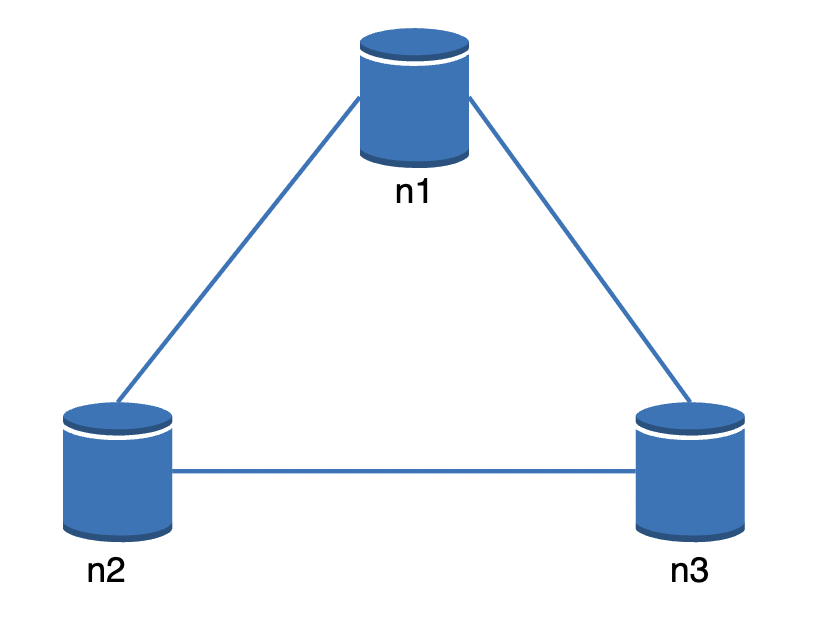
理想情况中的分布式数据存储示例:
在现实中,网络分区可能阻止节点间通信,例如节点 3:
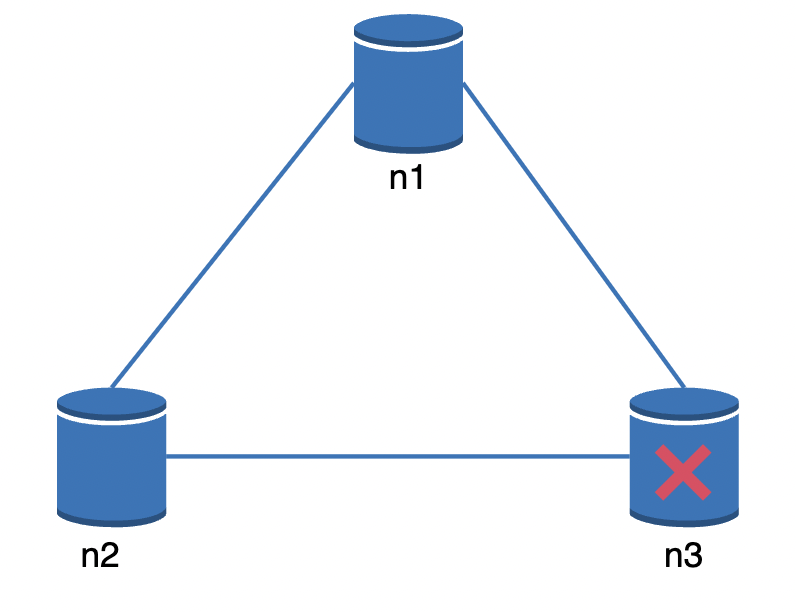
一致性优先:如果优先保证一致性,则上述情况下所有写操作会被阻塞。
可用性优先:如果优先保证可用性,系统会继续接受读写请求,但可能返回过时数据。在节点 3 恢复后,会重新同步数据。
具体选择需要根据需求与面试官讨论。
第三步:深入设计
以下是构建分布式键值存储的核心组件。
数据分区
对于足够大的数据集,无法在单台服务器上维护,因此需要将数据分成多个分区并分布到多个节点上。
挑战在于:
- 如何均匀分布数据?
- 在集群调整规模时,如何最小化数据迁移?
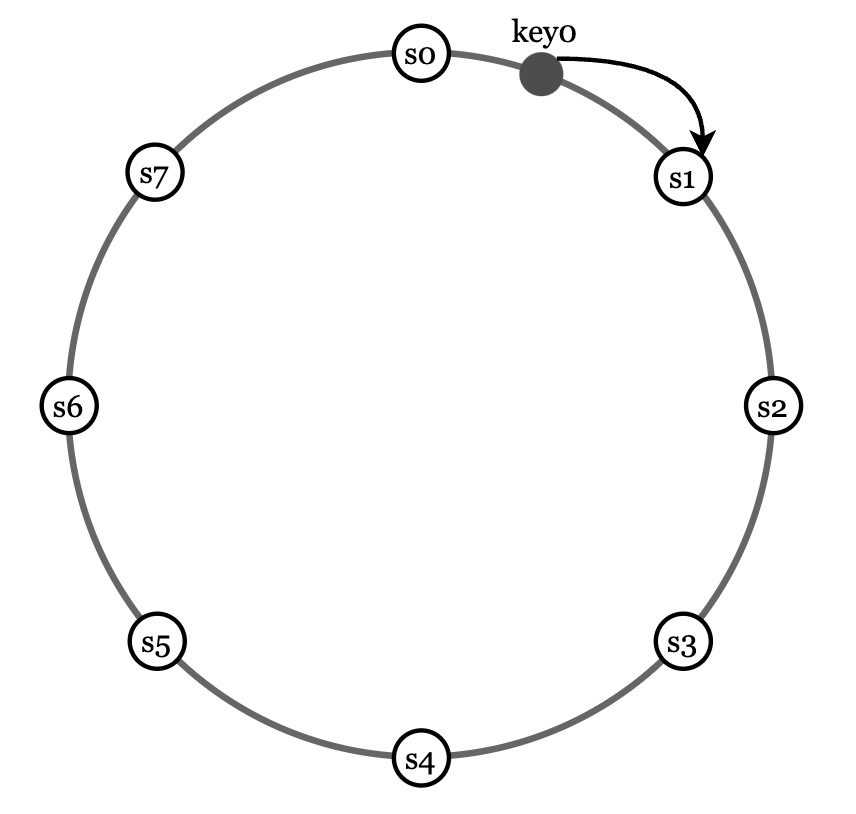
通过一致性哈希(上一章讨论过)可以解决这些问题:
- 将服务器映射到哈希环上。
- 对键进行哈希,并映射到顺时针方向最近的服务器。
优点:
- 自动扩展:可随意添加/删除服务器,且对键位置的影响最小。
- 异构性:容量更高的服务器可以分配更多虚拟节点。
数据复制
为实现高可用性和可靠性,需将数据复制到多个节点上。
可通过将键分配到哈希环上的多个节点实现:
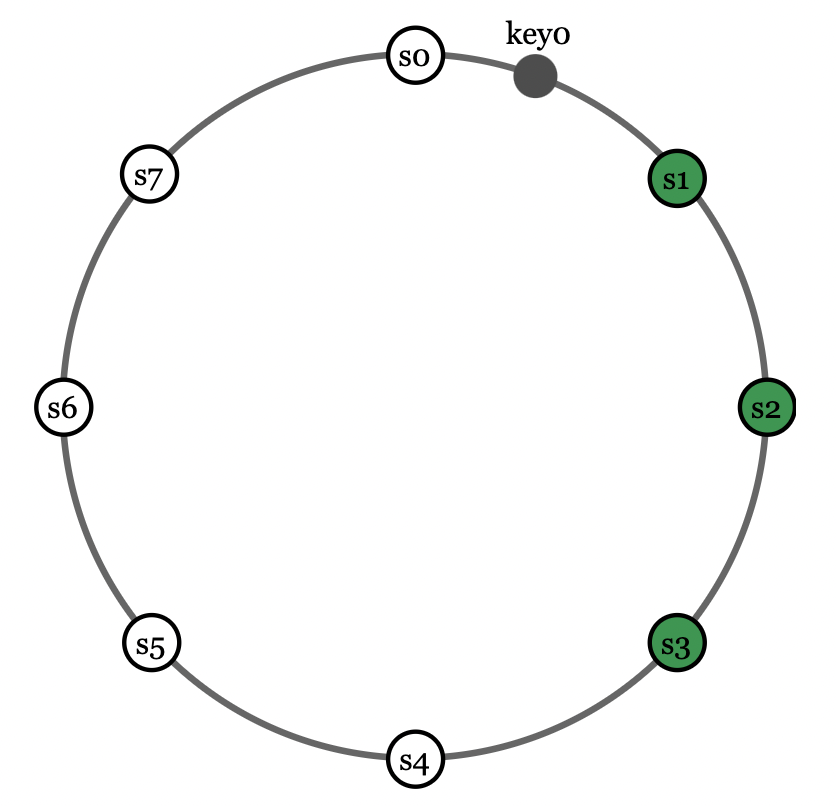
注意:复制时需避免所有副本分配到同一物理节点上。
为此,可选择不同的物理节点。为进一步提高可靠性,可将数据复制到不同数据中心中,防止单个数据中心的故障。
一致性
数据复制后,需要保持同步。
可以使用 Quorum 共识 来保证一致性:
N:副本数量W:写操作需确认的副本数量R:读操作需确认的副本数量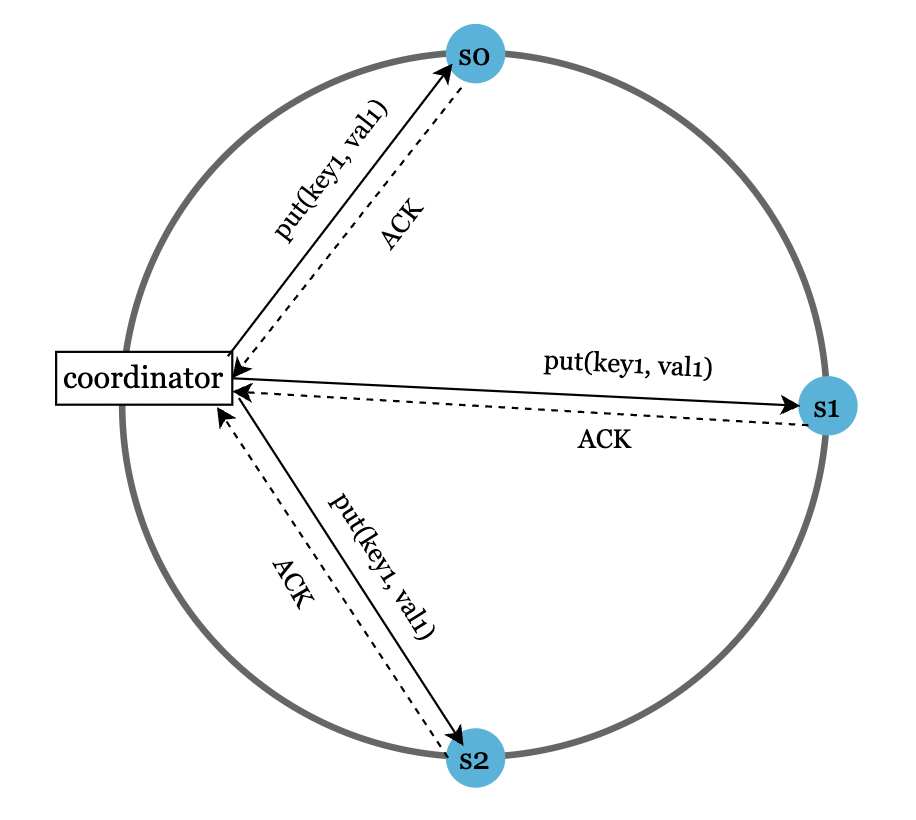
写共识示例
W 和 R 的配置需权衡延迟与一致性:
W = 1, R = 1:低延迟,最终一致性W + R > N:强一致性,高延迟
其他配置:
R = 1, W = N:强一致性,快速读,写操作较慢。R = N, W = 1:强一致性,快速写,读操作较慢。
一致性模型
常见一致性模型:
- 强一致性:始终返回最新数据。
- 弱一致性:可能返回旧数据。
- 最终一致性:可能返回旧数据,但最终所有键都会达到最新状态。
例如:Cassandra 和 DynamoDB 采用最终一致性。它允许并发写入,客户端负责解决数据冲突。
数据冲突解决:版本控制
复制提高了可用性,但可能引发数据不一致。例如:
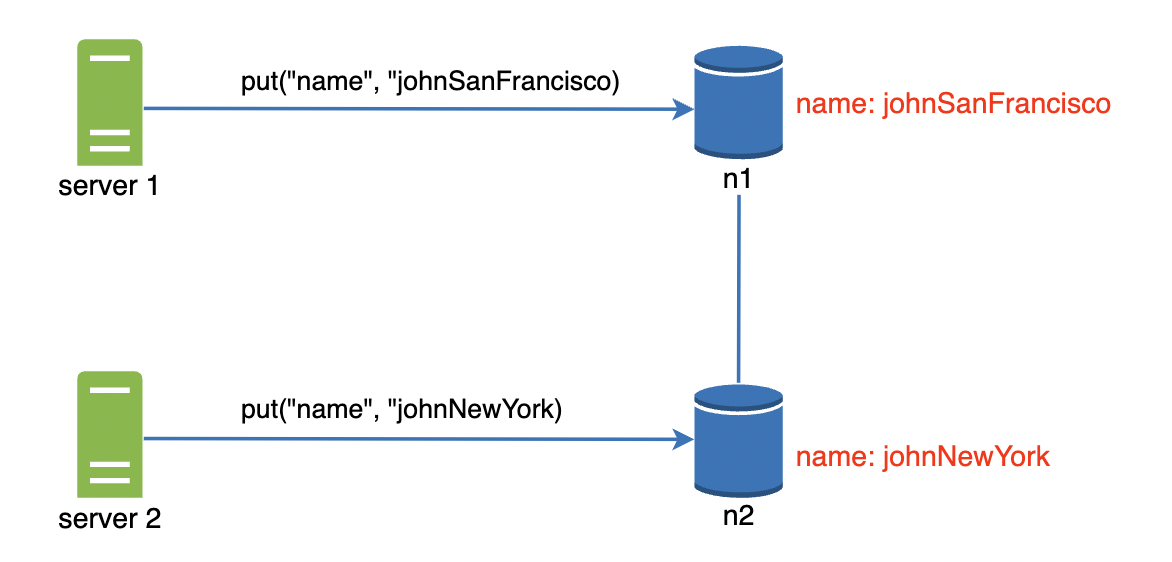
可使用向量时钟(Vector Clock)解决冲突。
向量时钟是 [服务器, 版本] 对,记录数据版本变化:
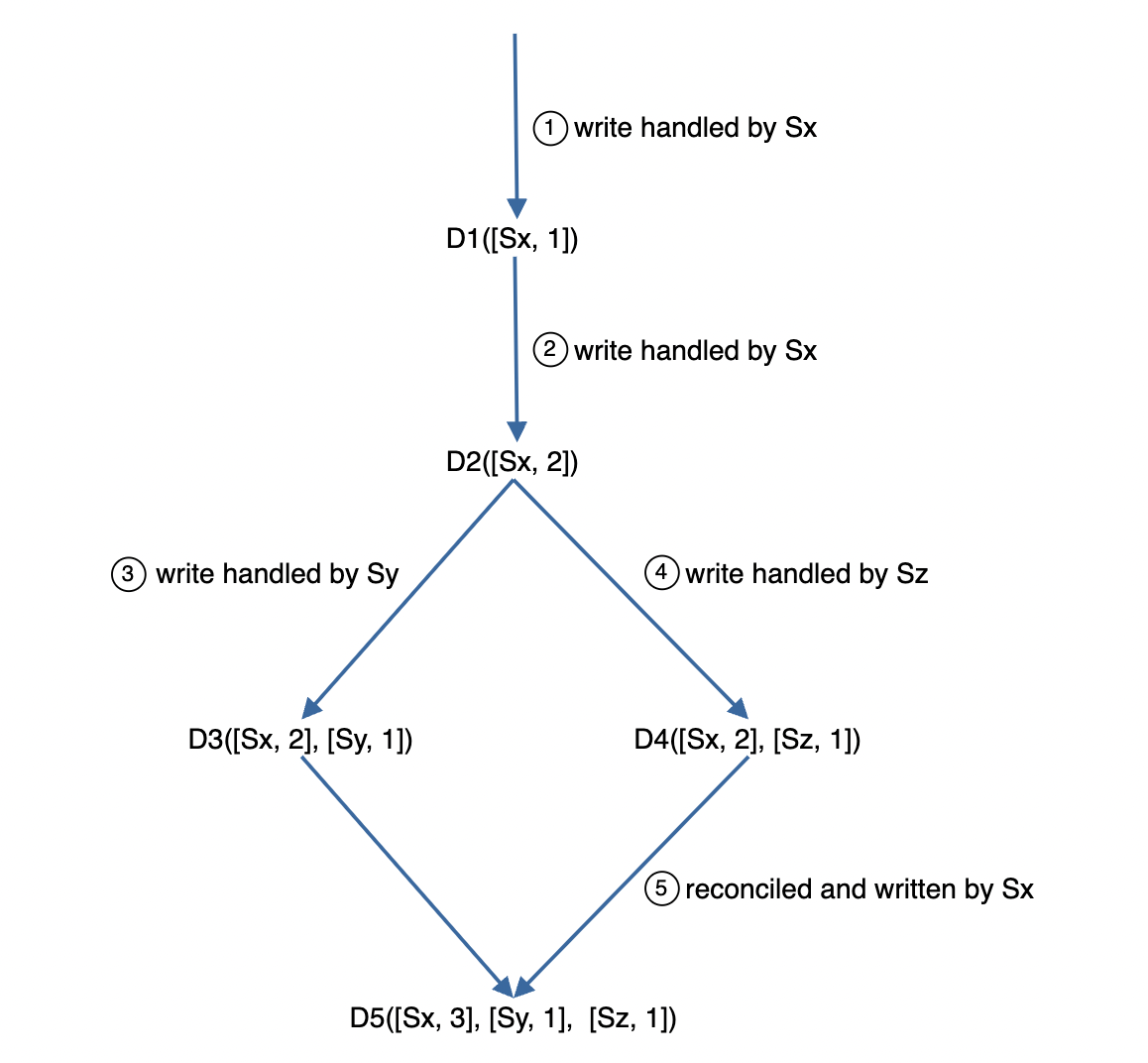
通过检测版本是否是祖先关系(版本戳是否小于另一版本)判断冲突:
[s0, 1][s1, 1]是[s0, 1][s1, 2]的祖先 -> 无冲突。[s0, 1]不是[s1, 1]的祖先 -> 需解决冲突。
权衡点:
- 增加客户端复杂性。
- 向量时钟可能迅速膨胀,增加内存开销。
故障处理
大规模分布式系统中,故障不可避免。需设计可靠的错误检测与恢复策略。
故障检测
判断服务器是否宕机不能仅基于网络中断。
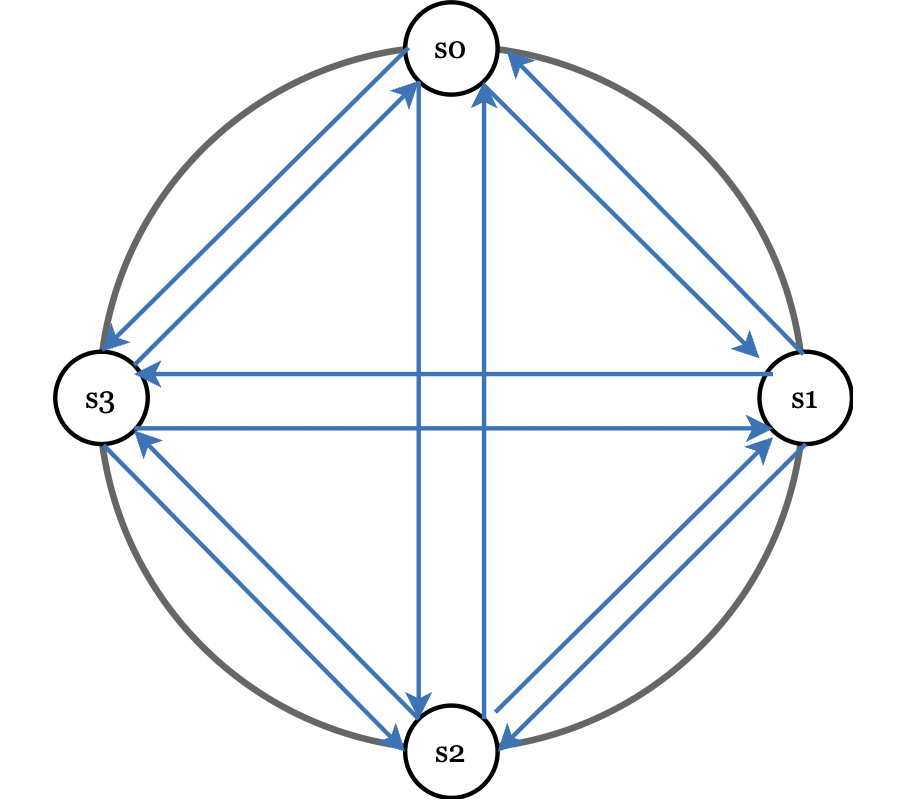
一种方法是全量多播(All-to-All Multicasting),但在节点多时效率低:
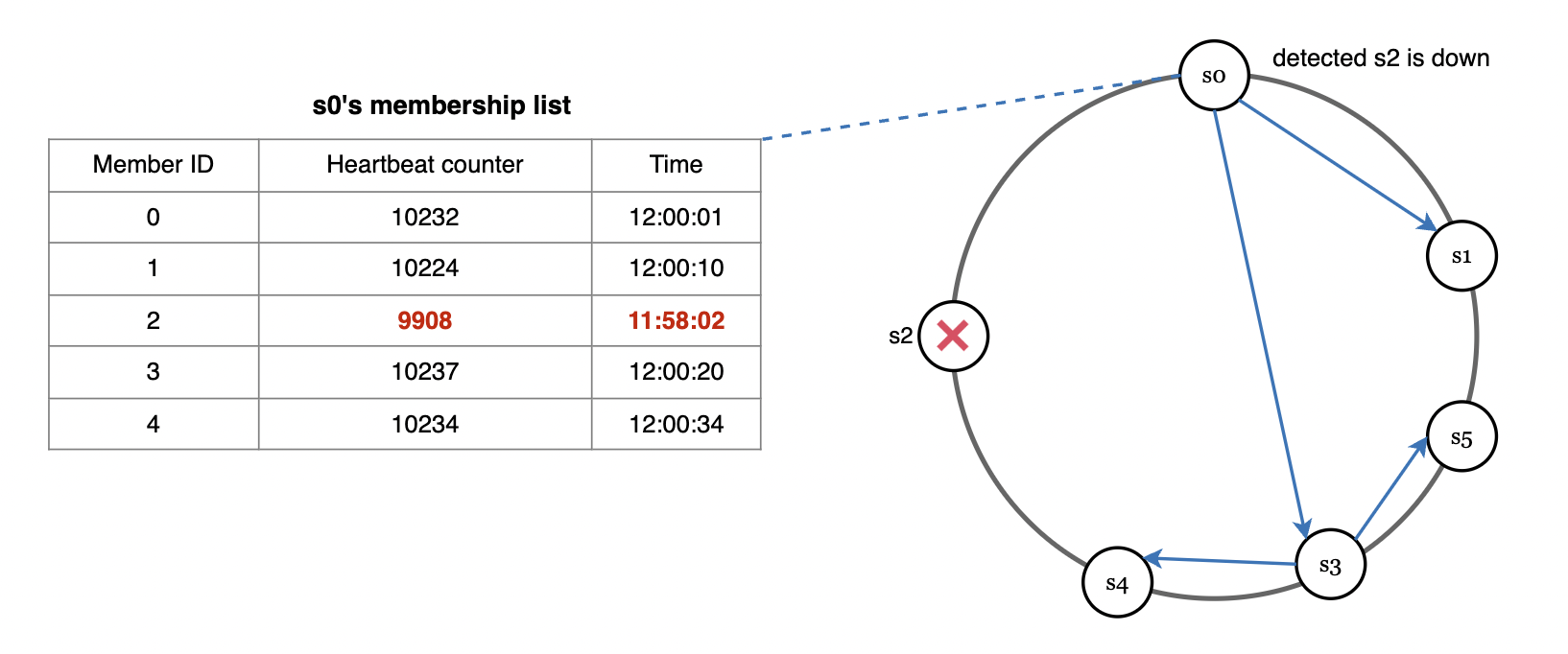
更好的方式是使用 Gossip 协议:
- 每个节点维护成员列表及心跳计数。
- 周期性随机向其他节点发送心跳,节点间传播心跳。
- 未收到心跳时,将成员标记为离线。
临时故障
通过 Hinted Handoff 提高可用性:
如果某节点暂时离线,可将其数据暂时交由健康节点处理,恢复后再回传。
永久故障
若副本永久不可用,可通过 Merkle 树 进行反熵协议(Anti-Entropy)同步数据:
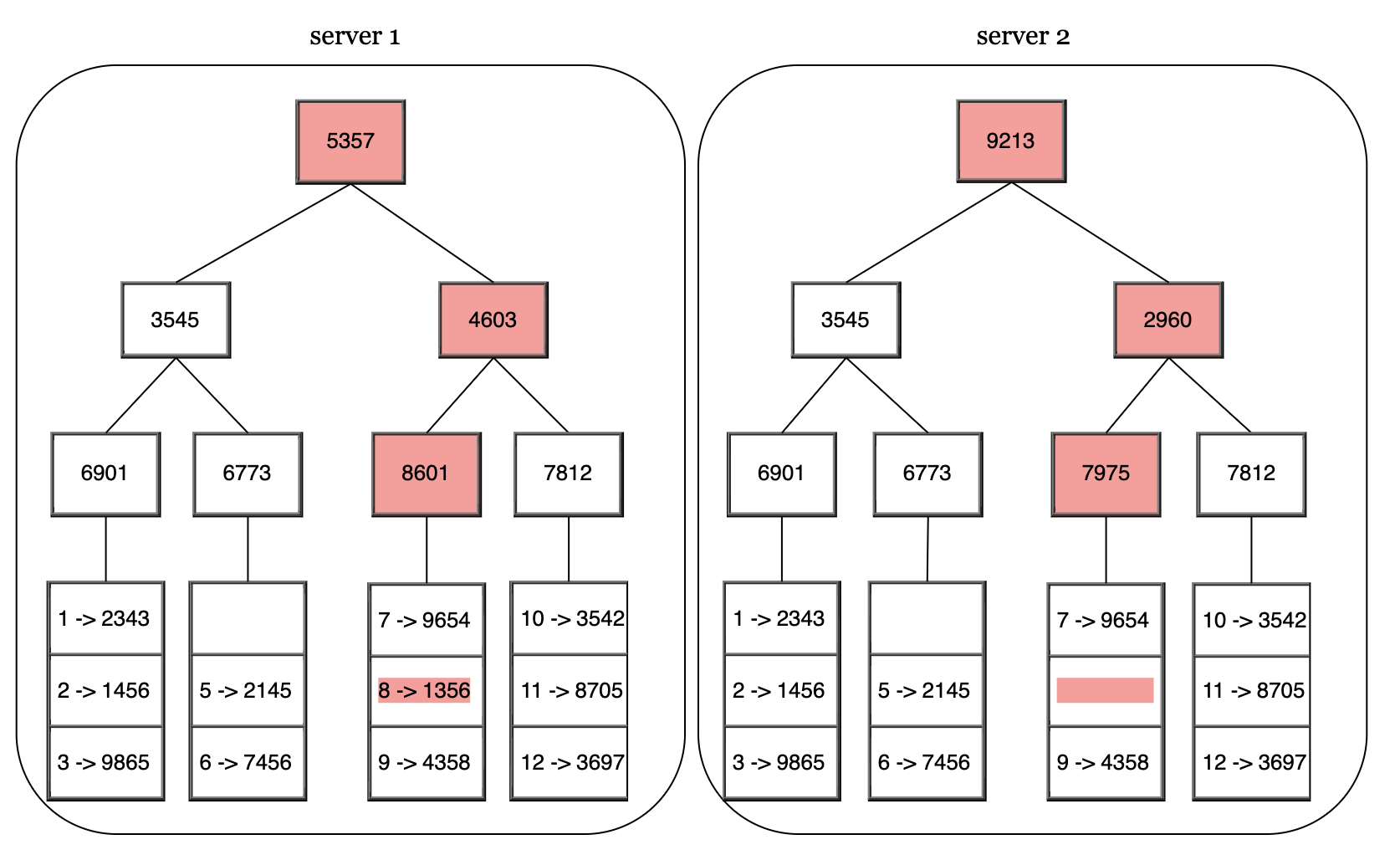
Merkle 树将数据分块,每块生成哈希,仅对不同块进行比较以减少传输数据量。
数据中心故障
自然灾害或硬件问题可能导致数据中心宕机。
为增强韧性,需将数据复制到多个数据中心中。
系统架构图
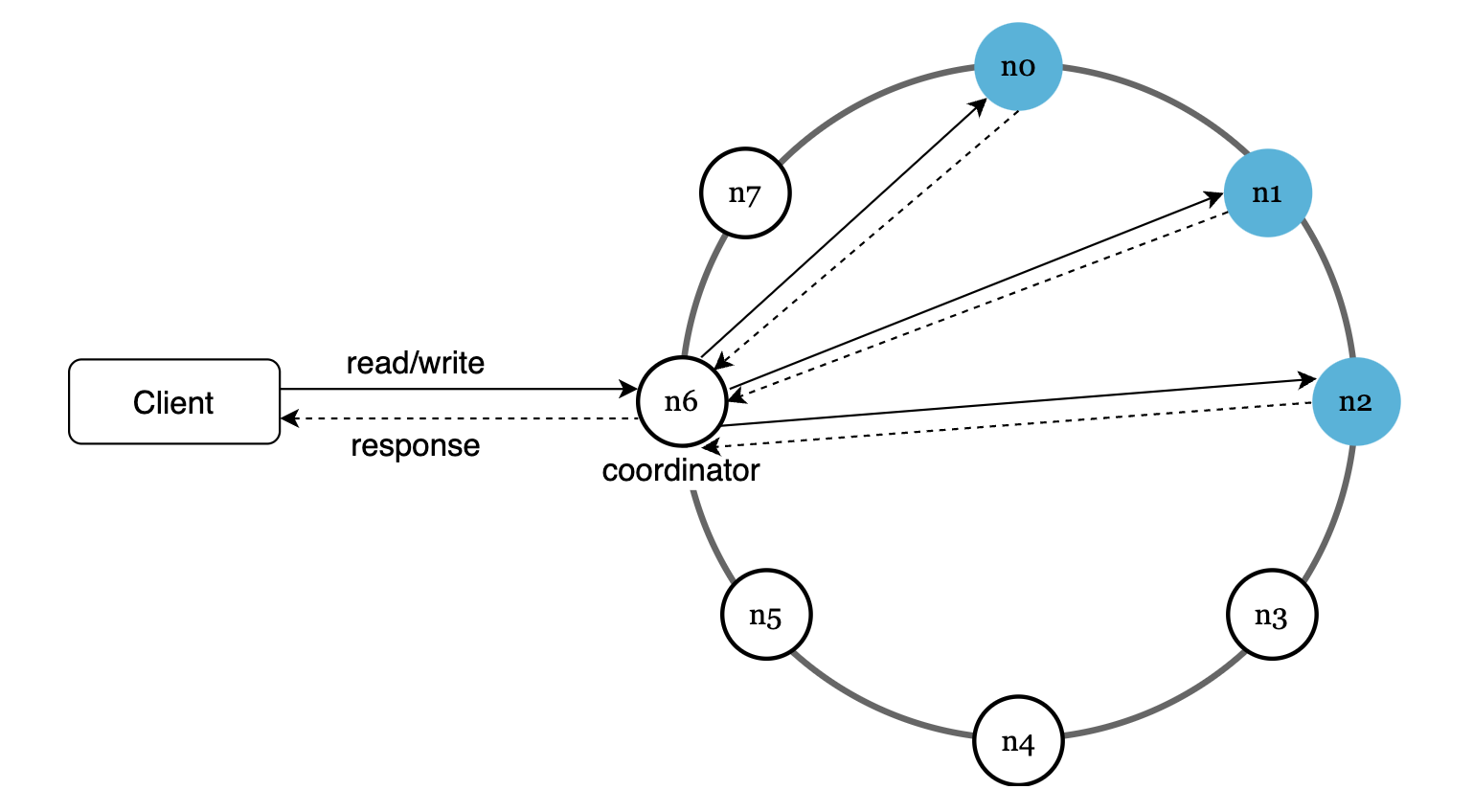
主要特性:
- 客户端通过简单的 API 与键值存储系统进行通信。
- 协调器作为客户端与键值存储之间的代理。
- 使用一致性哈希将节点分布在哈希环上。
- 系统为去中心化设计,支持自动化的节点添加和删除。
- 数据在多个节点上复制以确保可靠性。
- 系统无单点故障。
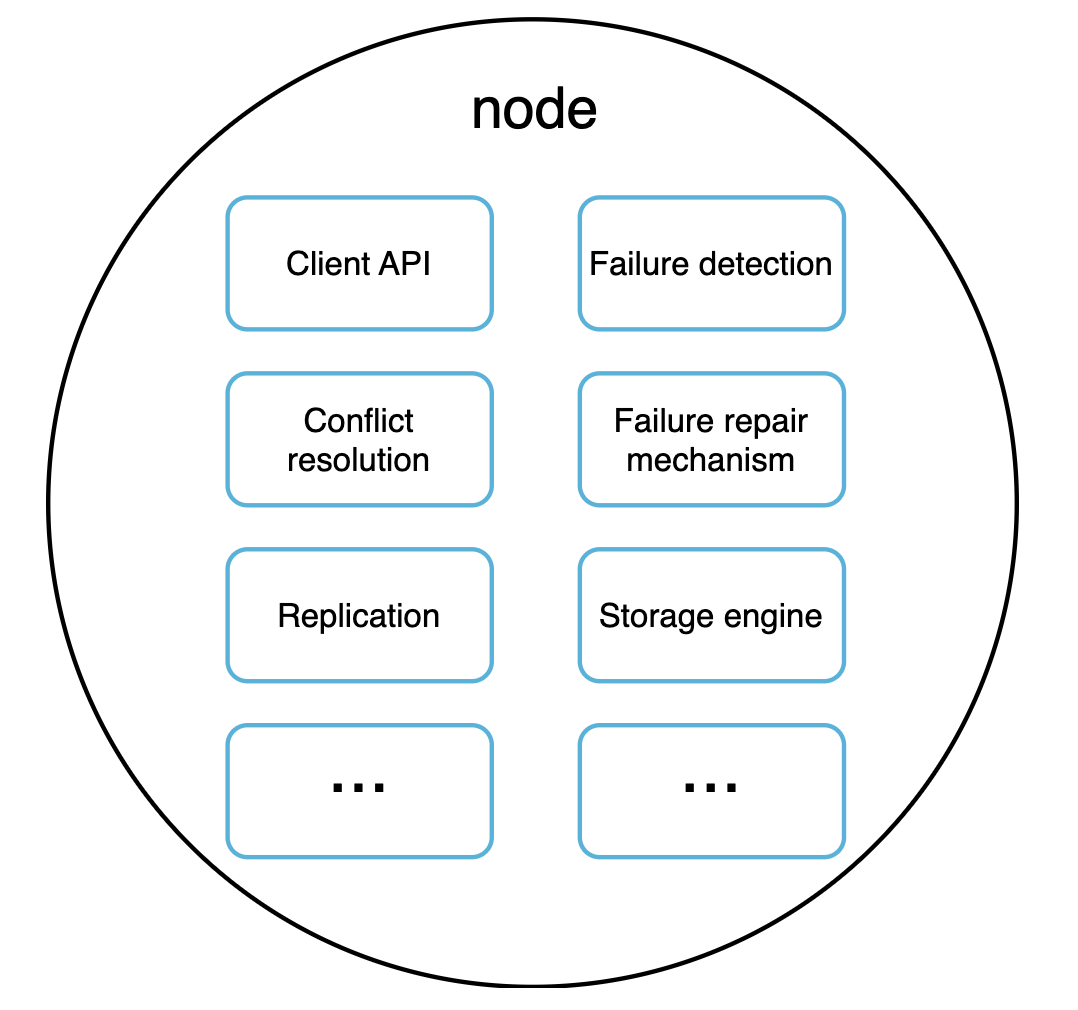
每个节点需负责的部分任务:
写入路径
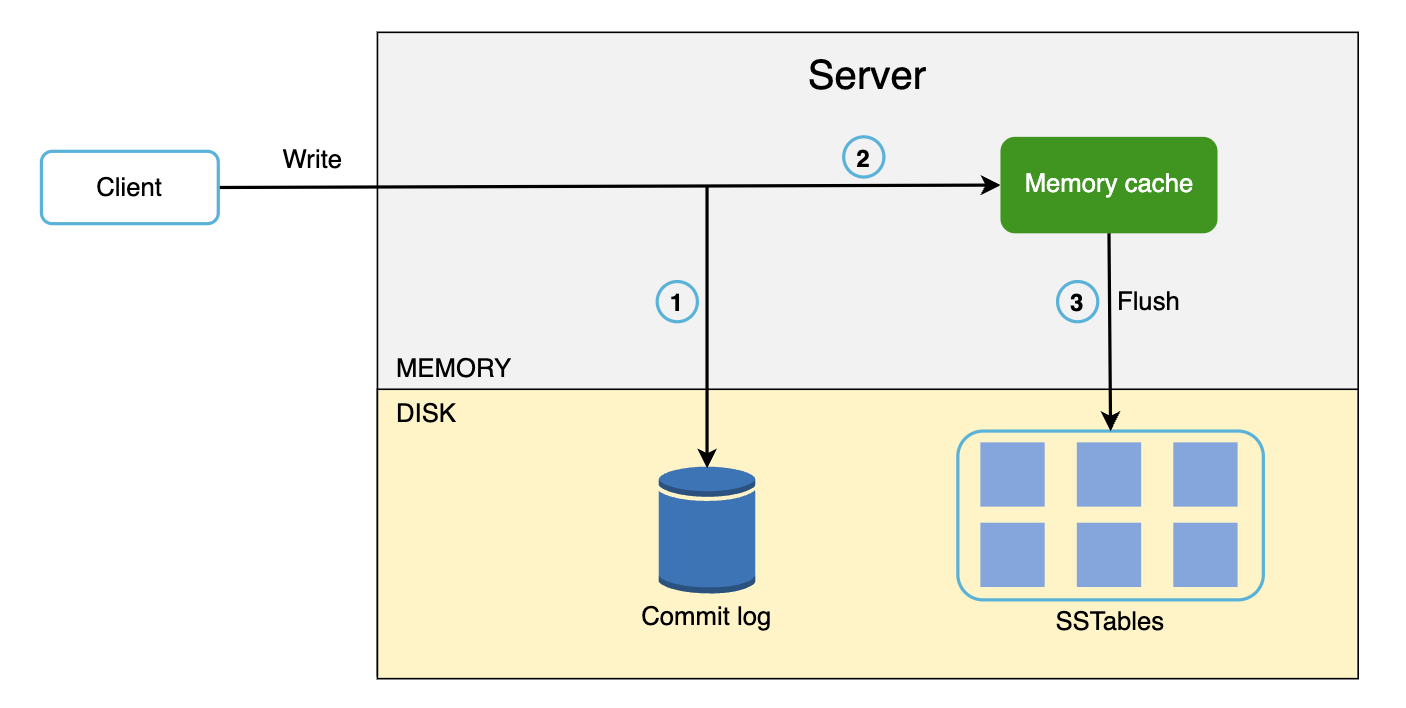
- 写请求会被持久化到提交日志(Commit Log)中。
- 数据被写入内存缓存。
- 当内存缓存满或达到设定阈值时,数据会刷新到磁盘上的 SSTable。
SSTable(排序字符串表):保存的是排序好的键值对。
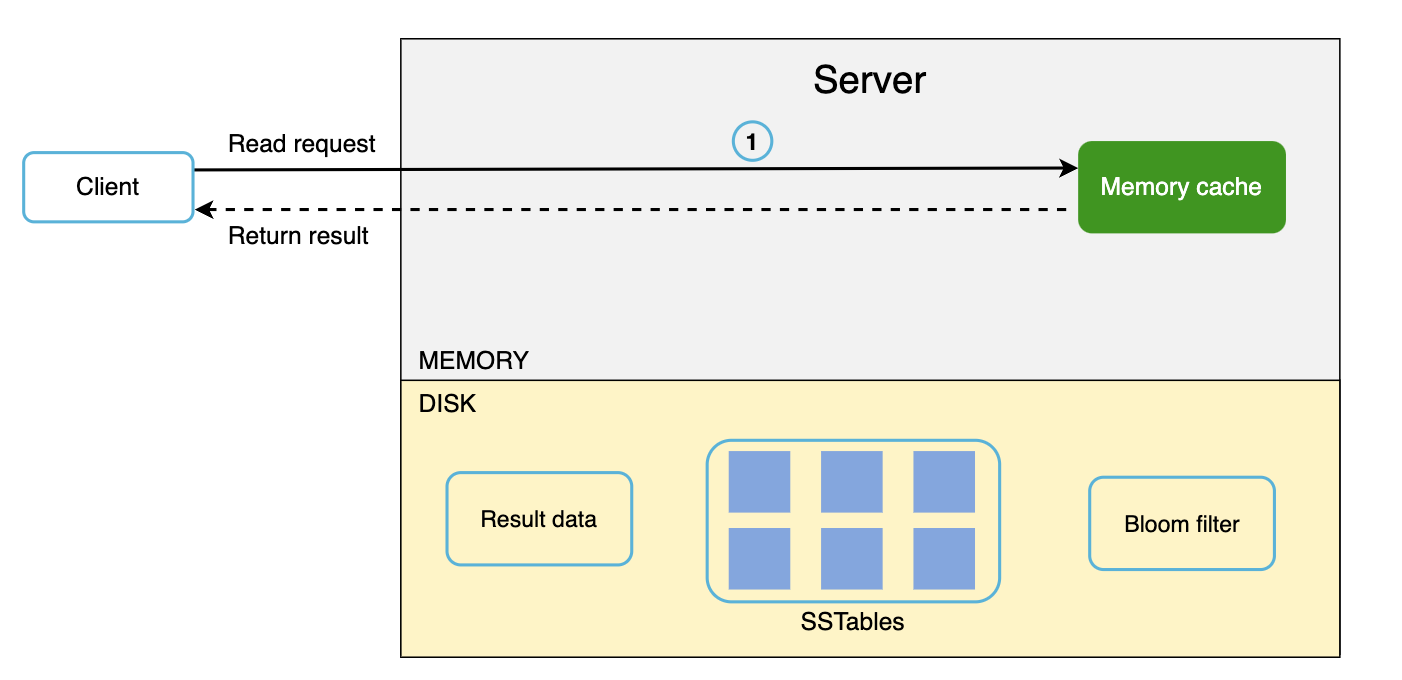
读取路径
当数据存在于内存中时的读取路径:
当数据不在内存中时的读取路径:
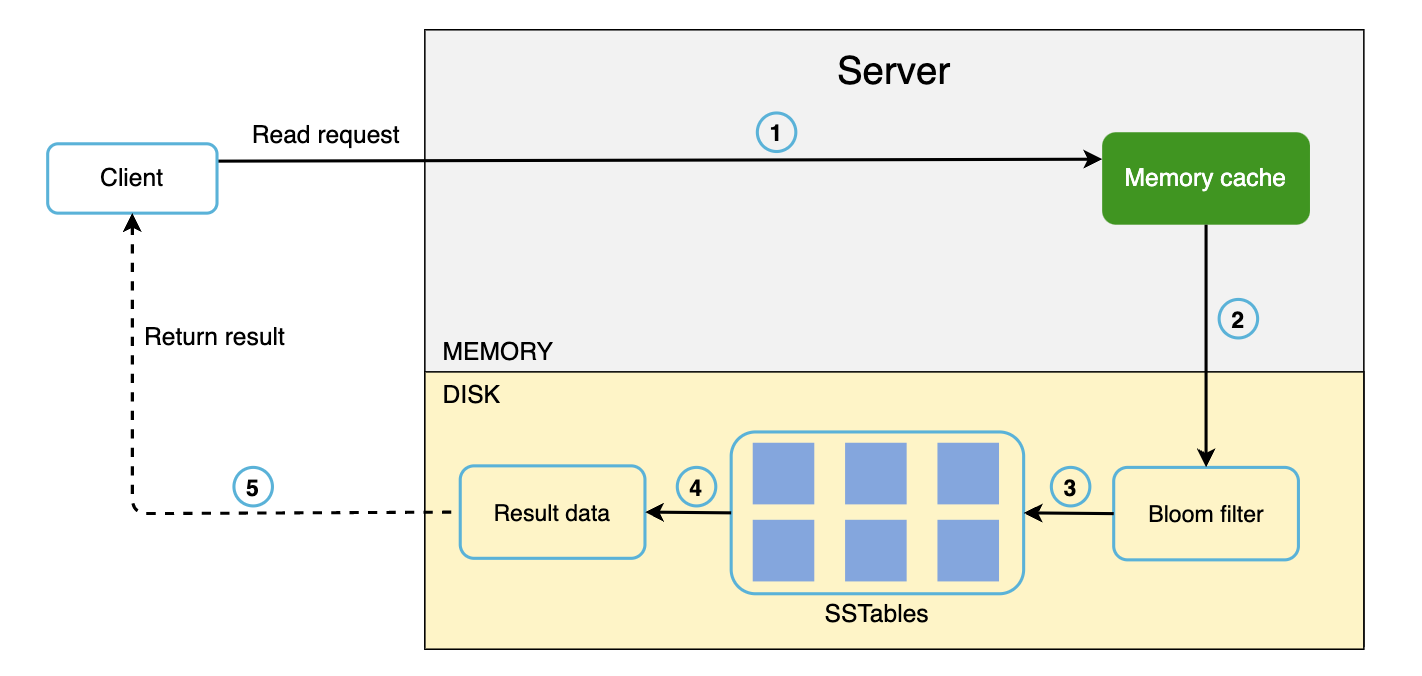
- 如果数据在内存中,则直接从内存中获取。否则,去 SSTable 中查找。
- 使用布隆过滤器(Bloom Filter)来高效定位 SSTable 中的数据。
- SSTable 返回结果数据后,最终将其返回给客户端。
第四步:总结
上述讨论涵盖了多个概念和技术,总结如下:
| 目标/问题 | 技术 |
|---|---|
| 存储大规模数据 | 使用一致性哈希将负载分散到多台服务器 |
| 高可用的读取 | 数据复制、多数据中心架构 |
| 高可用的写入 | 使用版本控制和向量时钟解决冲突 |
| 数据集分区 | 一致性哈希 |
| 增量扩展 | 一致性哈希 |
| 异构环境支持 | 一致性哈希 |
| 可调一致性 | 使用 Quorum 共识机制 |
| 处理临时故障 | Sloppy Quorum 和 Hinted Handoff |
| 处理永久故障 | 使用 Merkle 树 |
| 数据中心故障处理 | 跨数据中心复制 |